Текст книги "Сверхъестестественное. Научно доказанные факты"
Автор книги: Сергей Кернбах
Жанр: Прочая образовательная литература, Наука и Образование
Возрастные ограничения: +16
сообщить о неприемлемом содержимом
Текущая страница: 24 (всего у книги 39 страниц) [доступный отрывок для чтения: 10 страниц]
Также в 2012 году была проведена серия сеансов дальней и сверхдальней связи с сенсорами на глубокополяризованных электродах [324]. Передача сигнала была проведена между Германией и Австралией (с В. Замшей, 13 500 км), Россией и Германией (с Ю. П. Кравченко, 3200 км) и между различными городами Центральной Европы [24; 149]. Были проведены автоматизированные сеансы связи между Москвой (с В. А. Жигаловым, 2000 км) и Штутгартом, полностью без какого-либо участия человеческих операторов. Они должны были ответить на вопрос о независимой от человека природе ЭНС. В 2013–2014 годах были сделаны в какой-то мере уникальные работы с С. Н. Маслобродом (Штутгарт – Кишинев, 1500 км) по сравнению воздействия операторов и приборных генераторов и выяснению роли временных эффектов при ЭНС [25]. Например, было показано, что, используя отображения из прошлого (старые фотографии), ЭНС создает связь между настоящими состояниями этих объектов. С В. Замшей и В. Т. Шкатовым были проведены сеансы связи в режиме «от одного ко многим» [150]. Во всех этих работах было проделано более 300 независимых экспериментов с более чем 1200 измерениями переданного сигнала.
Таким образом, в настоящее время уже накоплен большой фактический материал по эффекту нелокальной связи, где показано наличие ЭНС в различных электронных, химических, физических и биологических макросистемах [13; 15; 26; 522]. Одна из современных гипотез, объясняющих эффект нелокальной связи, заключается в так называемой макроскопической запутанности (macroscopic entanglement). Она связана с когерентным состоянием макроскопических тел, по аналогии с квантовой запутанностью на микроуровне [505]. Достижению макроскопически запутанных состояний в multi-body системах посвящено немало теоретических и экспериментальных работ, например [224; 426], поскольку это тесно связано с созданием квантового компьютера. Одним из основных затруднений является наличие сильных внутренних взаимодействий и взаимодействий с окружающей средой в макроскопических телах, которые вызывают декогерентность их состояний. Если теоретические работы и технические эксперименты 80–90-х годов по ЭНС проводились в основном в СССР, сейчас наблюдается расширение этих работ в Европе, Азии и США. Перед тем как начать более подробное описание некоторых из этих экспериментов, мы хотели бы привести цитату из революционной работы А. Е. Акимова и соавторов, уже с точки зрения критической массы материала, накопленного в настоящем.
Далее цитата из статьи Акимова А. Е., Тарасенко В. Я., Толмачева С. Ю. «Торсионная связь – новая физическая основа для систем передачи информации» («Электросвязь», № 5, 2001). Комментарии: «торсионный» – принятая авторами гипотеза, объясняющая работу приборов; «унифицированный торсионный передатчик» – Большой Генератор Акимова; «адресный признак» – слайд-позитив (фотография) соответствующего растения; С. Ю. Толмачев – начальник кафедры Академии ФСБ.
«Впервые в мире передача двоичных сигналов по торсионному каналу передачи информации была осуществлена в Москве (СССР) в апреле 1986 года. Этим работам предшествовали успешные эксперименты в 70-е годы, выполненные в Московском НИИ радиосвязи…
Исходя из этого, была выбрана следующая схема эксперимента. Торсионный передатчик был размещен на первом этаже здания около кольцевой автомобильной дороги г. Москвы, а торсионный приемник находился в центральной части г. Москвы. Расстояние между этими пунктами по прямой составляло 22 км. Торсионные передатчик и приемник не имели устройств, выполнявших функции антенн, вынесение которых, например, на крыши домов позволило бы обойти здания и рельеф местности. В силу неэлектромагнитной природы торсионных волн эффект отражения по аналогии с отражением коротких волн от ионосферы был исключен. Таким образом, торсионный сигнал от передатчика к приемнику мог распространяться только по прямой через рельеф местности и железобетонные стены всех зданий, находящихся на пути сигнала.
С учетом плотности застройки в Москве препятствия на пути торсионного сигнала, создаваемые зданиями, были эквивалентны железобетонному экрану толщиной более 50 м. В действительности ситуация была еще более сложной. Известно, что для равнин дальность до линии горизонта составляет около 5 км. Поэтому при дистанции в 20 км по прямой между двумя точками на поверхности Земли траектория торсионного сигнала проходила около 10 км сквозь толщу влажной земли, что для обычно используемых радиотехнических систем связи практически невозможно.
На передающем конце торсионного канала связи использовался торсионный передатчик конструкции А. А. Деева. В качестве торсионного приемника применялась биоэлектронная система. Ее работа основывалась на свойстве клеток тканей изменять проводимость мембран под действием торсионного поля. Это свойство было в неявном виде установлено В. А. Соколовой в 1982 году, а в 1990-м и другими исследователями. Возможность дальних дистантных влияний торсионного поля на проводимость тканей вслед за работами В. А. Соколовой, но на другой аппаратурной базе, была подтверждена в начале 1986 года в работах, выполненных под руководством И. В. Мещерякова. В этих исследованиях впервые в явном виде было экспериментально показано, что при изменении знака торсионного поля меняется знак электрической проводимости тканей относительно среднего уровня. Это указывало на возможность использования биосистемы для приема двоичных сигналов: одному двоичному сигналу (одному знаку поля) можно поставить в соответствие один уровень проводимости биосистемы, а другому двоичному сигналу (другому знаку поля) – другой уровень проводимости, находящийся на другой стороне относительно уровня, соответствующего проводимости биосистемы в отсутствии торсионного поля.
В первом цикле экспериментальных сеансов связи передача сигналов осуществлялась в адресном режиме на систему из пяти приемников. В месте приема торсионного сигнала на интервале времени ожидания передачи (6 ч) не были известны: время начала передачи, структура передаваемого сигнала, а также номер приемника, на который будет осуществлена передача. Сигнал принимался без ошибок именно тем приемником, адресный признак которого был использован при передаче.
Во второй серии экспериментальных сеансов передачи торсионных сигналов торсионный передатчик был размещен на пункте приема. Это соответствовало нулевой длине трассы связи и отсутствию поглощающих сред. В этом случае торсионные сигналы не отличались по интенсивности от сигналов, проходящих через поглощающие среды. Это было свидетельством отсутствия поглощения торсионных сигналов различными средами. Именно это и предсказывалось теорией.
Сам факт передачи и приема торсионного сигнала был столь же значим, как и первые опыты А. С. Попова и Г. Маркони для всего дальнейшего развития радиосвязи. Успешно выполненные эксперименты означали революцию, начало новой эпохи в задачах передачи информации. С их помощью была продемонстрирована возможность дистантной передачи торсионной информации, а также передачи торсионных сигналов через поглощающие среды без ослабления при малых мощностях энергопотребления передатчика (30 мВт), которое было необходимо лишь для формирования торсионного сигнала…
За исключением экспериментов 1986 года по передаче информации по торсионным каналам связи, все последующие работы выполнялись с использованием унифицированного торсионного передатчика (габаритные размеры 500 × 500 × 400 мм, масса 4,5 кг). Этот передатчик позволяет перестраивать несущую, регулировать интенсивность выходного сигнала, работать с любым видом модуляции. Таким образом, обеспечивается совместимость радио– и проводной связи с торсионной, что отвечает, по крайней мере, идеологии семиуровневого протокола Р. Сибсера [33] в средствах и комплексах связи».
Приборы и методология экспериментов
В этом и дальнейших разделах мы будем придерживаться той же философии описания оборудования и экспериментов из нашей лаборатории, что и в предыдущих главах. Тематически, материал разбит на три больших блока: эксперименты типа «прибор – прибор», «оператор – прибор» и биологические опыты. Для них использовались одинаковые активные и пассивные установки для приема и передачи «высокопроникающего» сигнала.

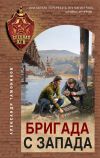
Рис. 109. Схема расположения сенсоров во всех экспериментах. Лаборатории «B» и «C» без окон находятся в подвале здания, толщина несущих железобетонных стен порядка 35 см. Каждая из сенсорных установок 3, 4 и 5 имеет два ЭМ-экрана из латуни и два тепловых экрана из натуральной шерсти.
Приемная часть. Базовая схема проведения экспериментов показана на рис. 109. Все сенсорные установки помещены в закрытый металлический шкаф, который находится в подвальной лаборатории без окон. Она отделена от остальных лабораторий несущими железобетонными стенами толщиной в 0,35 м. Во всех экспериментах на расстоянии: от 5 до 15 метров были установлены генераторы в соседней лаборатории, отделенной двумя такими стенами; от 15 до 50 метров между генератором и сенсорами находились множественные железобетонные конструкции, генераторы находились в том же здании; более 1000 метров – генераторы находились в других зданиях. Для устойчивого определения сигнала в этих экспериментах генератор, как правило, работает с периодом в 4 часа: один час включение и три часа перерыв, после чего весь цикл повторяется. Сенсоры калибровались и результаты статистически обрабатывались [24; 149; 324].
Поступающий сигнал детектировался одновременно 9 кондуктометрическими ДЭС сенсорами (в поздних экспериментах использовались и другие сенсоры). Для контроля параметров окружающей среды замерялись значения механических воздействий тремя акселерометрами KXSC7-2050 (чувствительность 660 мВ/г); температура измерялась тремя типами сенсоров: NCP21XV103J03RA, LM35AH и AD592CNZ, размещенных в восьми местах на всех установках с чувствительностью измерения ниже 0,01 °C с 20-битным АЦП; измерения ЭМ-поля произведены с анализатором спектра 9 кГц – 7 ГГц производства «Rohde & Schwarz»; акустические воздействия измерялись прибором «Metrel C-MI 6301» (20–10000 Гц, 30–130 дБ). Флюктуации электромагнитного поля не были обнаружены выше -90 дБм, акустических помех выше 30 дБ, то есть на грани чувствительности этих приборов. Измерялась интенсивность ЭМ и магнитного поля прибором ME 3951A производства «Gigaherz Solutions» в диапазоне 5 Гц – 400 kHz. Всего записывалось 25 каналов данных с частотой дискретизации 1 Гц. Все значения помечены маркером времени. Запись производилась непрерывно без включения или выключения детекторов.

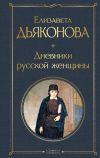
Рис. 110. Адресные фотографии в структурных усилителях, использованных в экспериментах по эффекту нелокальной связи.
Для адресации цветные цифровые фотографии объектов (генераторы, сенсоры или другие объекты) помещались под сенсоры или же клались в крайние конусы структурных усилителей (СУ) (см. рис. 110). Сами СУ нацеливались на сенсоры в непосредственной близи экранирующих модулей. СУ использовались исключительно в пассивном режиме (без активных модулей), какая-либо настройка на стороны света не выполнялась.
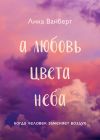
Генераторы. Были использованы несколько разных типов оптических генераторов (светодиодный, лазерный и оптоволоконный), в том числе и совместная работа нескольких генераторов. Цель экспериментов с двумя генераторами (см. рис. 111) заключалась в выяснении степени влияния второго генератора на интенсивность взаимодействия.

Рис. 111. (а) Два светодиодных и (б) лазерный генераторы, укрепленные на штативах с питанием от аккумуляторов; (в) два светодиодных генератора с питанием от аккумуляторов, используемые как передатчики, снизу видно цифровое отображение приемника.
Стационарные генераторы устанавливались на штативы, переносные генераторы монтировались в стандартных корпусах, позволяющих объединять два и более генератора в один излучатель (см. рис. 111). Фотография адресного признака клалась непосредственно перед генератором. Для двух генераторов тестировались те условия, которые позволяли лаборатории «B» и «C»: углы между генераторами 0° и 90°. Как показали эти выборочные эксперименты, заметных изменений показаний сенсоров при углах 0° и 90° не наблюдается. Наличие второго генератора несколько улучшает показания сенсоров за счет биения частот. При калибровке генератора было отмечено улучшение показаний сенсоров при наличии вторичной модуляции сигнала генератора. Возможно, что это биение создает в своем роде «третичную» модуляцию и именно этот эффект ведет к улучшению показаний. Использование лазерного генератора совместно со светодиодными генераторами также ведет к улучшению реакции сенсоров.
Контрольные измерения. В дни, предшествующие экспериментам, был произведен контрольный замер значений температуры, механических воздействий и тока через один из токовых сенсоров на протяжении 40 часов (см. рис. 112). В это время в здании находилось минимальное количество людей (выходной день), в лабораторию с детекторами никто не входил, в соседних лабораториях не работали никакие приборы. Как видно из рис. 112, ток, проходящий через сенсор, следует медленному изменению температуры без существенных флюктуаций.
Эксперименты типа «прибор – прибор»
Эти эксперименты можно разделить на три большие серии: до 50 метров между сенсорами и генераторами (см. таблицу 7), более 1,65 км по передаче цифрового сигнала (см. таблицу 8), и специальные сеансы связи по удаленной передаче ПИД-программ. Результаты частично опубликованы [24; 25; 149; 150; 324; 466; 523] и будут публиковаться далее. В опубликованных работах содержатся описания более 300 экспериментов с более чем 1200 измерениями переданного сигнала. Типичные города, с которыми устанавливалась связь, – это Халле (360 км), Кишинев (1500 км), Москва (2068 км), Уфа (3227 км), Томск (5000 км), Перт, Западная Австралия (13 798 км), а также различные города центральной Европы.



Рис. 112. Контрольный эксперимент А199 (40 часов), показания акселерометра (a), температурного (б) и токового (в) сенсоров в установке номер три. Без воздействия сенсоры демонстрируют монотонную динамику без резких отклонений.
Сенсоры в большинстве экспериментов по ЭНС находились в пассивном режиме термостабилизации, то есть без термостатов. При анализе результатов оценивались изменения, вызванные температурными колебаниями (см. рис. 113). Если температурные изменения совпадали с окном передачи информации, эти результаты игнорировались. В целом мы не можем найти существенных различий в показаниях сенсоров, полученных на дистанции до 50 метров через железобетонные стены в одном здании и на расстояниях более 1650 метров в разных зданиях. Как пример, на рис. 114 показана модуляция сигнала работающим генератором на расстоянии 5,5 и 1650 метров. И в том, и в другом случае наблюдается сходная модуляция сигнала посредством изменения тренда.
Таблица 7. Результаты экспериментов на расстоянии до 50 метров, запись – 90°, г1 в B, г2 в C – означает 90 градусов между генераторами, расположенными в лабораториях «B» и «C», данные из [149].


Таблица 8. Результаты экспериментов на расстоянии более 50 метров, данные из [24]; A – расстояние, км; B – экспозиция – время, на которое были включены генераторы, мин; C – адресация; D – ментальное воздействие; E – количество экспериментов; F – количество сенсоров; G – всего реакции T2H; I – отсутствие реакции; J – примечания.


1. После переноса генераторов на новое место.
2. В качестве адресации использовался метод одной фотографии.
3. Две фотографии по методу Шкатова-Замши.
4. Три других сенсора показали реакцию в пределах ±30 минут за рамками эксперимента.


Рис. 113. Эксперимент С228, расстояние 50 метров через множественные железобетонные стены, показания (a) температурного сенсора; (б) токового сенсора установки номер три. Все изменения температуры помечены маркерами «t», отмечены также соответствующие изменения в динамике тока. Видно, что сенсор регистрирует не только изменения температуры, но и включение/выключение светодиодных генераторов (отмечено кружком). После значительного изменения амплитуды сенсор на некоторое время теряет чувствительность/


Рис. 114. (a) Эксперимент С219, расстояние 5,5 метров, включены два генератора в лаборатории С (через две железобетонные стены); (б) эксперименты С235–С236 на расстоянии 1,65 км между генераторами и сенсорами.
Сенсоры на основе глубоко поляризованных электродов (ДЭС-сенсоры) являются одними из наиболее чувствительных сенсоров, однако они имеют одну неприятную особенность – из-за релаксационных процессов после изменений происходит кратковременная потеря чувствительности. По этой причине было изготовлено большее количество сенсоров, так чтобы порядка 40–45 % сенсоров всегда демонстрировали реакцию (см. далее статистический анализ реакции сенсоров). Примеры динамики сигнала под воздействием генератора показаны на рис. 115. Как видно, типичные изменения – это в основном изменение тренда стационарного или осциллирующего сигнала. Уровень шумов достаточно низок для устойчивого распознавания точки изменения. Сигнал анализируется, как правило, за 2–3 часа до воздействия, во время воздействия и через 2–3 часа после воздействия. В следующем разделе мы покажем более точный анализ сигнала во время воздействия.
В экспериментах адресация была проведена в основном с помощью метода цифровых отображений. Сенсоры были сфотографированы цифровой камерой, и распечатанная на принтере цветная фотография размещалась перед генераторами. Время экспозиции составляло между 30 и 60 минутами. В некоторых экспериментах были применены две фотографии – одна перед генератором, вторая под сенсорами. Также использовался специальный случай двух фотографий сенсоров (метод Шкатова – Замши). Сравнивая эксперименты с одной и с двумя фотографиями, нужно отметить более сильную реакцию сенсоров на две фотографии. Еще большая реакция демонстрировалась в том случае, если фотографии были укреплены в структурных усилителях.
Расстояние в 13 798 км. В качестве примера мы приведем отчет о сверхдальних экспериментах между городами Перт (Западная Австралия) и Штутгарт, расстояние между которым составляет 13 798 км (согласно Google maps). Эти эксперименты были проведены совместно с Виталием Замшей, использовались генераторы его конструкции.
В первой серии было произведено 4 эксперимента с 36 замерами: два эксперимента, C239a и C239b, происходили 16 августа 2012 года, и вторые два, C240a и C240b, – 17 августа 2012 года. Исследователи в Австралии использовали два разных лазерных оптоволоконных генератора: первый (цилиндрический) был включен с 1:00 до 2:00, второй (конусный) с 5:00 до 6:00 западноевропейского времени 16 и 17 августа 2012. Использовался метод «Шкатова-Замши» для адресации воздействия.




Рис. 115. Результаты некоторых замеров в экспериментах С232 и С236 на расстоянии 1,65 км между генераторами и сенсорами в пределах 24 часов после переноса генераторов на новое место.
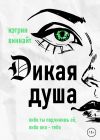
Как и во всех других экспериментах, записывались значения температурных сенсоров, опорного напряжения и акселерометра. Температурные, механические и электрические помехи отсутствуют, то есть условия этих экспериментов соответствуют условиям других экспериментов. На рис. 116 показаны значения сенсоров, наиболее четко отреагировавших на оба воздействия в экспериментах C239 и C240.
Мы наблюдаем отчетливые изменения тренда во время воздействия. В целом из 36 сенсоров показали отклик 20 сенсоров, что лежит в пределах 50 % реакций для этого типа датчиков. На основании этих результатов мы можем говорить о позитивном результате всех экспериментов, то есть успешном детектировании сенсорами, находящимися в Германии, воздействия генератора, с мощностью оптического излучения 1 mW, находящегося в Австралии. Детали этого эксперимента могут быть найдены в [24].


Рис. 116. Показания сенсоров, отреагировавших на воздействия a и b в экспериментах C239 и C240, расстояние – 13 798 км. Четырехэлектродный сенсор S1 третьей установки: (а) показания вольтового сенсора; (б) показания токового сенсора.
Вторая серия экспериментов была произведена 5 и 6 сентября 2013 года. В г. Перт на этот раз использовался электромагнитный генератор на основе вектора Пойнтинга, в г. Штутгарт дополнительно использовались высокочастотные кондуктометрические сенсоры со структурным усилителем. Генератор имел возможность переключать полярность излучения. Поскольку СУ является «селективным резонансным усилителем», который пропускает только одну полярность излучения, то имелась возможность на приемной стороне фильтровать сигнал с нужной полярностью.




Рис. 117. Некоторые графики из экспериментов 5.09.13 и 6.09.13 по сверхдальней связи между г. Перт (Австралия) и г. Штутгарт (Германия), расстояние – 13 798 км. Показаны значения токового и частотного сенсоров.
Некоторые из полученных графиков показаны на рис. 117. Интенсивность первого воздействия составляет 2,88 ЕОИ[13]13
ЕОИ – единица относительных изменений, метрологическая единица, предложенная в [123].
[Закрыть]. Интенсивность воздействия на второй день составляет только 1,11 ЕОИ. Таким образом, наблюдается снижение интенсивности в повторных экспериментах. В целом эти эксперименты, помимо факта передачи цифрового сигнала, продемонстрировали возможность передачи двух полярностей излучения и подавления одной из этих полярностей посредством структурного усилителя. Детали этого эксперимента могут быть найдены в [150].
Пример статистического анализа данных. Здесь мы приведем пример анализа результатов, опубликованных в двух работах [24; 149]. Из-за переходных процессов в слое Гуи – Чепмена сенсоры периодически теряют свою чувствительность. Поскольку при воздействии на детектор не все 9 сенсоров демонстрируют реакцию, необходимо рассмотреть вопрос о статистической значимости показаний сенсоров. Представим значения ДЭС-сенсора как «1», если реакция сенсора совпала с временем воздействия (в течение часа), если не совпало – «0». Сформируем две контрольных группы (без воздействий): А1 – все значения равны «0», и А2 – один равен «1», остальные – «0». Таким образом, мы рассматриваем случаи идеальных сенсоров в А1 и наличие некоторого случайного процесса в А2, который может случайным образом «угадать» правильное время воздействия. Сформируем две группы результатов: B1 – три из девяти (6 из 18) значений сенсоров правильные, и B2 – пять из девяти (10 из 18) значений сенсоров правильные. Теперь проведем U-тест по методу Манна и Уитни для следующих случаев: A1-B1, A1-B2, A2-B1, A2-B2 (см. таблицу 9). Мы хотим определить, когда разница в значениях групп A и B будет статистически значимой.
Таблица 9. Результаты U-теста для групп A и B

На основе контрольных измерений [149; 324; 466] в экспериментах мы используем вариант A2-B1 (6 из 18) с α = 0,038 и, с оговоркой, A1-B1 (3 из 9) с α = 0,065, которые обеспечивают статистически значимую разницу относительно соответствующего случайного процесса.
Для демонстрации статистической значимости результатов мы выбираем два характерных эксперимента: EXP1 – С239–С240 (13 798 км) для приборных и EXP2 – С245–С246–С248–С251 (2105 км) для операторных взаимодействий (см. дальнейшие разделы). В каждом из этих экспериментов было проведено по 4 попытки с 9 сенсорами. Как уже говорилось, ДЭС-сенсоры периодически теряют чувствительность, поэтому необходимо принять различные предположения о характере временной неработоспособности сенсоров. В таблице 10 показаны результаты хи-квадрат-теста для EXP1, EXP2 относительно нуль-гипотезы о случайном характере результатов. Мы можем отвергнуть нуль-гипотезу с уровнем сигнификантности α ≤ 0,03 и α ≤ 0,06 для EXP1, EXP2 соответственно, если допустить, что два сенсора из 9 периодически теряют чувствительность.
Таблица 10. Результаты хи-квадрат-теста для EXP1 и EXP2.

Таблица 11. Обзор всех проведенных экспериментов, [24].

Как пример общих результатов, сошлемся на данные [24] (всего 52 эксперимента, 379 измерений сигнала), обзор которых показан в таблице 11. Из приборных взаимодействий 79 % экспериментов являлись позитивными и 21 % – негативными, из операторных взаимодействий – один эксперимент был негативным и 13 позитивных. Иными словами, эти эксперименты находятся в общем русле экспериментов с «высокопроникающим» излучением с соотношением позитивных результатов порядка 75–85 %.
Правообладателям!
Данное произведение размещено по согласованию с ООО "ЛитРес" (20% исходного текста). Если размещение книги нарушает чьи-либо права, то сообщите об этом.Читателям!
Оплатили, но не знаете что делать дальше?