Автор книги: Сергей Петроченков
Жанр: Техническая литература, Наука и Образование
Возрастные ограничения: 12+
сообщить о неприемлемом содержимом
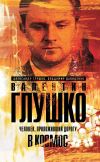
Союз ГВК (проект)


Грузовой корабль Союз ГВК
«Союз ГВК» – российский грузовой космический корабль, находящийся в стадии разработки. Как и грузовой корабль «Прогресс», «Союз ГВК» базируется на корабле «Союз» с экипажем. Однако «Союз ГВК» будет способен вернуться на Землю и доставить груз обратно, тогда как «Прогресс» сгорает в атмосфере Земли по окончании своей миссии. В настоящее время единственным грузовым космическим аппаратом, способным возвращать груз с орбиты, является грузовой космический аппарат SpaceX Dragon. «Союз ГВК» сможет доставлять на орбиту 2000 кг и возвращать 500 кг обратно на Землю. Его планируется запускать на борту ракеты-носителя «Союз 2.1 б».

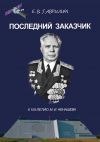
Exoliner-Jupiter (проект)


Транспортная система Exoliner– Jupiter
Exoliner-Jupiter – транспортный комплекс Lockheed Martin, состоящий из двух различных транспортных средств. Одно из них (Jupiter) представляет собой космический буксир, оснащенный двигательными установками и рукой-манипулятором, а другое (ExoLiner) – собственно грузовой аппарат, который является вариантом грузового отсека европейского ATV для перевозки грузов на МКС. В метафоре железнодорожного транспорта, приведенной компанией на пресс-конференции (состоявшейся на вокзале Union Station в Вашингтоне), Jupiter – это «локомотив», в то время как Exoliner – «вагоны». Lockheed Martin начнет доставку грузов путем совместного запуска Jupiter и Exoliner на Atlas V. Аппарат будет стыковаться с МКС с помощью робота-манипулятора станции, во многом так же, как Cygnus и Dragon.

Отсеки корабля
После разгрузки до 5000 кг груза, а затем загрузки мусора для утилизации, отстыковываются и уводятся в сторону. Вместо того чтобы сразу же сойти с орбиты, два КА будут оставаться на ней недели или даже месяцы. В течение этого времени они могут выполнять дополнительные задачи, такие как запуск малых спутников или дистанционное зондирование с помощью размещенных датчиков. Дорогой компонент этой системы остается на орбите и может использоваться в каждой миссии. Следующим пуском Atlas V запустит только Exoliner с грузом. Jupiter вместе со «старым» Exoliner встретится с новым кораблем, который

Стыковка корабля к МКС с помощью робота-манипулятора
соединен с верхней ступенью Centaur. С помощью манипулятора Jupiter поменяет модули Exoliner: «новый» будет пристыкован к МКС, а «старый» – к «Центавру», который затем включит двигатель и сойдет с орбиты.

Перестыковка грузового модуля Exoliner с помощью манипулятора на буксире Jupiter
Арго (проект)


Многоразовый грузовой космический корабль Арго
Арго – многоразовый грузовой космический корабль. Проектируемый корабль, запускаемый с помощью ракеты-носителя, будет способен доставлять на орбиту полезный груз массой до 2 т и затем возвращать на Землю груз массой до 1 т. Спуск про-исходит по баллистической схеме с торможением посадочными двигателями, включаемыми на высоте 250 м. Приземление осуществляется на выдвижной амортизированный щит, выдвигаемый на высоте 100 м. Основное назначение корабля – снабжение орбитальной пилотируемой станции.

Модули грузовика

Возвращаемый аппарат
Предполагается провести экспериментальную отработку конструкции на ракете-носителе «Союз-2.1Б», в дальнейшем планируется использовать разрабатываемую новую ракету «Союз-5». Полная масса корабля «Арго» – 11,5 т, объем грузового отсека – 11 м³, диаметр – 4,1 м, высота – 5,6 м. Баки комбинированной двигательной установки (обеспечивает маневрирование на орбите, перед спуском отделяется) вмещают до 1200 кг топлива, такая же емкость у баков объединенной двигательной установки (обеспечивает управление спуском и посадку). 52% от суммарной массы корпуса корабля будут составлять композитные элементы.

Компоновка корабля
Время полета в составе орбитальной пилотируемой станции – до 300 суток; схожий по параметрам американский Dragon может находиться в составе станции до 720 суток. Корабль предусматривает возможность автономного полета до 30 суток для проведения исследований, экспериментальной отработки, выполнения прикладных задач с возможностью возвращения оборудования и грузов заказчика; обеспечивает высокую точность посадки в заданный район, а также спасение грузов на этапе выведения на ракете-носителе.

Схема полёта
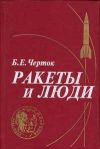
Dragon


Многоразовый грузовой космический корабль Dragon
Dragon – многоразовый грузовой космический корабль. Корабль состоит из двух отсеков – герметичного спускаемого аппарата и негерметичного грузового отсека (по терминологии SpaceX – «кузов»). Полная длина изделия составляет 6.1 м при диаметре 3.6 м. Таким образом, «Дракон» чуть короче «Союза», но значительно больше по диаметру. Сухая масса корабля составляет 4200 кг, масса топлива – до 1290 кг. В первом полете стартовая масса «Дракона» была примерно 5200 кг; предельная масса с грузом, задаваемая характеристиками носителя, составляет 9800 кг. В отличие от всех других кораблей «капсульного» типа («Союз», Apollo, «Шэньчжоу», Orion, CST-100), служебные системы «Дракона», включая двигательную установку, расположены в СА. По мнению разработчиков, такое решение обеспечивает возможность многократного использования самых ценных частей корабля.

Схема корабля Dragon
Кроме служебных систем, в СА объемом 10 м3 можно разместить до 3310 кг полезного груза, требующего особо бережного обращения. Размер переходного люка позволяет доставлять на МКС крупногабаритные грузы, в том числе и стандартные стойки оборудования. На Землю Dragon может вернуть до 2500 кг грузов. Такая возможность выгодно отличает корабль Маска от существующих беспилотных «грузовиков», используемых для снабжения МКС. Система жизнеобеспечения позволяет поддерживать внутри герметичного отсека давление около 1 атм, температуру в диапазоне 10—46°С и относительную влажность 25—75%. В беспилотных полетах это будет просто кондиционирование. Двигательная установка включает 18 ЖРД Draco тягой по 41 кгс, работающих на долгохранимых самовоспламеняющихся компонентах – азотном тетроксиде (AT) и монометилгидразине (ММГ). Двигатели применяются для ориентации, орбитального маневрирования,

Стыковка корабля к МКС с помощью роботизированного манипулятора
сведения корабля с орбиты в конце полета и (в импульсном режиме) для управления спуском. СА оснащен единым стыковочным механизмом СВМ (Common Berthing Mechanism), который может быть выполнен как в стандарте стыковочной системы с низким уровнем нагрузок LIDS (Low-Impact Docking System), принятом для американского «правительственного» корабля Orion, так и в варианте с андрогинным периферийным агрегатом стыковки АПАС. Во время полетов к МКС корабль будет подходить к станции и зависать рядом с ней, после чего экипаж сможет захватить его манипулятором SSRMS и пристыковать к соответствующему узлу станции. Стыковочный механизм установлен в носовой части СА и во время запуска прикрыт полусферическим обтекателем. Система электропитания со средневитковой мощностью 1500 Вт (пиковая – до 4000 Вт) имеет в своем составе две панели солнечных батарей, устанавливаемые на негерметичном отсеке, и литий-ионную аккумуляторную батарею в СА. Напряжение постоянного тока в бортовой сети 28 и 120 В. Система управления корабля позволяет реализовать полностью автономный режим сближения и стыковки с МКС с возможностью ручного управления в пилотируемой конфигурации, бортовое радиоэлектронное оборудование имеет резервирование, позволяющее парировать до двух отказов. СА оснащен двумя видами теплозащиты: облегченной боковой (по

Внутри грузовика
типу легких белых «матов», закрывающих самые «холодные» участки верхней поверхности орбитальных кораблей системы Space Shuttle) и мощным донным экраном из абляционного материала PICA-X (Phenolic Impregnated Carbon Ablator) на основе углеродных волокон, пропитанных фенолформальдегидной смолой. На разработку экрана диаметром З.6 м, способного выдержать температуру до 2200°С, потребовалось четыре года. Специалисты SpaceX считают, что он не будет повреждаться при спуске и сможет повторно использоваться для многих рейсов; судя по отличному состоянию экрана после первого полета, это вполне реально. Спуск с аэродинамическим качеством обеспечивает малые перегрузки и высокую точность посадки. Посадка осуществляется на воду (возможна аварийная – на сушу) с помощью парашютной системы, состоящей из двух тормозных куполов, раскрываемых на высоте около 13 км, и трех основных куполов, вводимых в действие на высоте немного более 3 км. Каждый из основных куполов имеет диаметр 35.4 м, что соответствует суммарной площади парашютной системы около 2950 м2.

Захват корабля манипулятором
Скорость снижения СА (от 4.8 до 5.5 м/с) обеспечивает комфортные условия приводнения. Второй – негерметичный – отсек объемом 14 м3 служит для размещения ПН массой до 3310 кг и одновременно выполняет роль переходника между второй ступенью ракеты и кораблем. Он имеет большой боковой люк для загрузки и открыт снизу для разгрузки на орбите. Кроме доставки грузов, не требующих герметизации, отсек может применяться для развертывания малых спутников. В штатном полете его отделение производится перед сходом с орбиты.

После приводнения

В сборочном комплексе
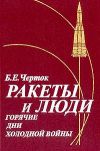
HTV


Транспортный грузовой корабль HTV
HTV (Н-II Transfer Vehicle) – беспилотный транспортный грузовой корабль, разработанный и построенный в Японии, предназначен для доставки на МКС различных грузов, в число которых входят расходуемые материалы ежедневной необходимости (продукты питания, вода, одежда и т.п.), материалы и оборудование для научных исследований, блоки и запасные части для обслуживания и ремонта станции. Однако основная цель корабля – пополнение запасов японской части МКС, известной под именем Kibo. Основная особенность HTV, отличающая его от российского «Прогресса» и европейского ATV, – способность доставлять крупногабаритные герметичные грузы, размер которых ограничен просветом люков американского сегмента МКС, и оборудование, рассчитанное на транспортировку

и работу в условиях открытого космоса. Такие «посылки» могут извлекаться манипулятором из грузового отсека HTV и монтироваться непосредственно на внешней обшивке МКС или на специальной платформе в условиях открытого космического пространства. После выведения на орбиту HTV самостоятельно определяет свое положение по сигналам спутниковой системы GPS, рассчитывает параметры необходимых маневров в соответствии с заданным планом полета и осуществляет их.

Схема деления

После стыковки с МКС
На этапе дальнего сближения (с 23 км) корабль использует режим относительной навигации по GPS, а финальный подход с расстояния 500 м выполняет с использованием специального лазерного датчика RVS (Rendezvous Sensor). Корабль подходит к станции снизу и занимает положение под модулем JEM в т.н. «зоне захвата» на удалении около 10 м, после чего астронавт-оператор, находящийся на борту МКС, захватывает HTV с помощью роботизированного манипулятора SSRMS за такелажный узел типа FRGF и стыкует к узловому модулю Node 2 Harmony. В составе станции HTV может находиться до 30 суток. После выполнения своей задачи он будет загружен бытовыми отходами, сведен с орбиты и затоплен в расчетном районе Тихого океана. Внешне японский корабль представляет собой цилиндр, сопряженный с короткими коническими участками в головной и кормовой частях. Полная длина HTV-1 от торца стыковочного узла до плоскости среза сопел ДУ – 9.8 м, диаметр – 4.4 м, масса пустого корабля – 10.5 т, масса ПГ – 6 т. В первом полете HTV имел сухую массу 11.5 т и нес всего 4.5 т грузов, в том числе 3.6 т в герметичном грузовом отсеке.
Это обстоятельство обусловлено наличием дополнительных аккумуляторов и запаса топлива, необходимых для испытаний в автономном полете.
Корабль имеет следующие отсеки:
– комбинированный грузовой модуль MLC (Mixed Logistics Carrier);
– приборный модуль AM (Avionics Module);
– двигательный модуль PM (Propulsion Module).

Грузы внутри корабля
MLC занимает большую часть корабля и составляется из двух отсеков: герметичного PLC (Pressurized Logistics Carrier) и негерметичного ULC (Unpressurized Logistics Carrier). Модуль может комплектоваться в двух разных комбинациях отсеков: «герметичный + негерметичный» и «герметичный + герметичный». Последняя комбинация способна доставлять на МКС большую полезную нагрузку (до 7 т), нежели первая, которая, однако, несколько длиннее. В передней части герметичного грузового отсека PLC, имеющего длину 3.14 м, размещен стыковочный узел СВМ (Common Berthing Mechanism). Отсек PLC предназначен для хранения грузов, которые переносятся экипажем на МКС. Он может нести до восьми стандартных стоек полезной нагрузки размером 2032х1054x1016 мм и массой от 550 до 950 кг. В нем также предусмотрен резервуар, вмещающий до 300 кг воды для нужд станции. Члены экипажа МКС могут работать в герметичном отсеке HTV в повседневной одежде, хотя он не оснащен системой жизнеобеспечения: после стыковки внутренняя вентиляция в отсеке осуществляется через модуль Harmony посредством рукавов системы межмодульной вентиляции IMV (Inter-Module Ventilation). Атмосфера в отсеке примерно соответствует земной с давлением, равным атмосферному. Электрическая сеть герметичного отсека представлена двумя подсистемами.

Укладка грузов
Первая, постоянного тока напряжением 50 В, запитывается от аккумуляторных батарей приборного модуля, обеспечивая потребителей внутри отсека PLC. Вторая, постоянного тока напряжением 120 В, получает питание из бортовой сети МКС и распределяет его потребителям модулей PLC и AM. Терморегулирование внутри PLC обеспечивается нагревателями, установленными на стенках отсека. После стыковки температура в герметичном грузовом отсеке уравнивается с температурой МКС для предотвращения образования конденсата. Следом за герметичным модулем PLC идет негерметичный грузовой отсек ULC длиной 3.5 м, в котором подвозятся грузы на внешнюю платформу EF (Exposed Facility) японского комплекса Kibo. На одном боку отсека прорезан крупногабаритный люк, через который внутрь ULC устанавливается транспортная платформа ЕР (Exposed Pallet), несущая до 1500 кг грузов. После стыковки эта платформа с помощью японского манипулятора JEM RMS переносится на EF. Следом за негерметичным грузовым отсеком ULC расположен приборный модуль AM длиной 1.25 м. В нем размещена аппаратура подсистем управления и навигации, связи и обработки данных, электроснабжения.

Процесс стыковки с МКС
Подсистема управления и навигации обеспечивает полет HTV к станции в автономном режиме и под управлением Земли. Подсистема коммуникаций включает аппаратуру межорбитальной связи IOS (Inter-Orbit Link System), которая осуществляется через спутники TDRS, и канала близкой связи PLS (Proximity Link System), обеспечивающего радиообмен с МКС в зоне прямой видимости. Через спутники американской системы TDRS корабль получает команды с Земли или с борта МКС и передает в обратном направлении телеметрическую информацию. В состав системы электроснабжения также входят 57 небольших прямоугольных панелей солнечных батарей (СБ). Корабль буквально «облеплен» ими. В «корме» корабля расположен отсек РМ в форме усеченного конуса длиной 1.27 м. Здесь находится ДУ, предназначенная для стабилизации и ориентации, коррекций траектории и сближения с МКС, а также для сведения корабля с орбиты. В состав ДУ входят четыре маршевых ЖРД тягой по 50 кгс (490 Н) и 28 микродвигателей реактивной системы управления RCS тягой по 25 фунтов (11.2 кгс, 110 Н).

Отделение грузовика от третьей ступени ракеты-носителя
ТГК ПГ (проект)


Транспортный грузовой корабль ТГК ПГ
ТГК ПГ – это транспортный грузовой корабль повышенной грузоподъемности (изделие 372А355), который призван уменьшить стоимость доставки грузов на МКС за счет снижения количества запусков грузовиков к станции с четырех до трех в год. На новом корабле предполагается отправлять 3400 кг грузов (на 800 кг больше, чем у «Прогресса»), что снизит стоимость доставки 1 кг грузов на 15% по отношению к «Прогрессу МС». Грузовой отсек будет иметь центральный тоннель и полки для размещения грузов, что облегчит и ускорит их перенос на станцию и позволит использовать корабль как склад во время его нахождения в составе МКС. На 21-й Научно-технической конференции молодых ученых и специалистов, прошедшей в РКК «Энергия», был представлен доклад о дальнейших путях повышения массовой и экономической эффективности запуска ТКГ ПГ.

ТГК ПГ на орбите
В нем предлагаются следующие мероприятия. Во-первых, оптимизируется компоновка приборно-агрегатного отсека путем исключения из него цилиндрического несущего корпуса топливного модуля. При этом шесть топливных баков устанавливаются в один ряд, а маршевый двигатель размещается между баками. За счет этого высота базового блока комбинированной ДУ уменьшается приблизительно в два раза, а масса конструкции ТКГ ПГ – примерно на 200 кг.

Общий вид корабля
Во-вторых, вместо головного обтекателя (ГО) 204КС производства РКЦ «Прогресс» используется более легкий и дешевый РБФ1.750 изготовления НПО имени С. А. Лавочкина. При этом масса переходного отсека снижается на 130 кг, ГО – на 300 кг. Соответственно масса ТКГ ПГ на опорной орбите увеличивается приблизительно на 150 кг. В-третьих, создается новая система электропитания (СЭП) с меньшими габаритами солнечных батарей на базе арсенид-галлиевых фотоэлектрических преобразователей, которые размещаются на корпусе агрегатного отсека, и литий-ионных батарей.
В результате масса СЭП снижается приблизительно на 200 кг. В-четвертых, ТКГ ПГ выводится на незамкнутую орбиту с перигеем минус 496 км и апогеем 193 км с последующим довыведением собственными двигателями. Масса корабля после отделения от РН «Союз-2.1 Б» составляет 9100 кг, а после довыведения на орбиту 143x275 км – 8410 кг. Это позволяет увеличить массу ТКГ ПГ на опорной орбите примерно на 100 кг. В-пятых, двигательная установка 14Д23 третьей ступени носителя выключается по окончании компонента топлива. Реализация указанных мероприятий может обеспечить общее снижение стоимости доставки 1 кг грузов на МКС до 28% по сравнению с эффективностью базового варианта ТКГ ПГ
ATV


Грузовой космический корабль ATV
ATV – европейский грузовой космический корабль. Основными задачами ATV являются:
– доставка на МКС грузов, рассчитанных на хранение при атмосферном давлении (научная аппаратура, запчасти, инструменты, продукты питания, другие расходные материалы), а также жидкостей (вода) и сжатых газов;
– дозаправка баков российских модулей «Звезда» и «Заря» компонентами топлива;
– коррекции орбиты МКС, управление ориентацией станции, разгрузка гиродинов во время полета в составе станции;
– удаление отходов с МКС и их утилизация при разрушении ATV в земной атмосфере. ATV способен доставить на рабочую

Отсеки корабля
орбиту МКС высотой 400 км и наклонением 51.6° до 7667 кг грузов, среди которых могут быть:
– до 5500 кг сухих грузов в интегрированном грузовом отсеке;
– до 840 кг воды;
– до 100 кг воздуха, кислорода или азота;
– до 860 кг топлива из баков дозаправки.
Корабль рассчитан на удаление с МКС до 6500 кг отходов. Максимальный диаметр корабля по панелям противометеоритной защиты MDPS (Micrometeoroids and Debris Protection Sub-system) – 4482 мм. В полетной конфигурации длина корабля от конца выдвинутой стыковочной штанги до среза сопел маршевых двигателей R-4D-11 на корме – 10268 мм, максимальный поперечный размер по развернутым панелям солнечных батарей – 21389 мм. Корабль ATV состоит из интегрированного грузового отсека ICC (Integrated Cargo Carrier; при запуске находится сверху) и служебного модуля SSA (Spacecraft Sub-Assembly). ICC служит для размещения в нем доставляемых сухих грузов, воды, газов и топлива для дозаправки, а также для обеспечений стыковки с МКС. ICC включает:
– российскую систему стыковки RDS;
– герметичный модуль оборудования ЕРМ (Equipped Pressurized Module);

Компоновка грузовика
– негерметичный отсек внешнего оборудования ЕЕВ (Equipped External Bay).
Герметичный отсек ICC сварен из алюминиевого сплава А1—2219. Внутренний набор и негерметичные отсеки изготовлены из сплава А1-6061-Т6. Из него же выполнен внешний противометеоритный экран MDPS. Между этим экраном и корпусом располагается вторичный экран из нескольких слоев некстела и кевлара. Экранно-вакуумная теплоизоляция изготовлена из нескольких слоев позолоченного каптона. Модуль ЕРМ выполнен как укороченный вариант европейского грузового модуля MPLM. Он имеет длину 4096 мм, максимальный диаметр – 4482 мм. Его основу составляет цилиндрическая обечайка, спереди и сзади которой приварены конические днища. В центре переднего днища приварен переходный конический туннель, на котором крепится стыковочный узел RDS. Общий герметичный объем ЕРМ составляет 46.5 м3, из которых 23.5 м3 – свободный объем, а 23 м3 отведено для размещения грузов. Внутри ЕРМ установлены блоки аппаратуры управления стыковочным узлом RDS, аппаратура российской системы управления оборудованием RECS, блок системы управления и контроля CMU (Command and Monitoring Unit). Кроме того, в ЕРМ смонтированы элементы системы контроля параметров внутренней атмосферы и жизнеобеспечения ECLS (Environmental Control and Life Support), включая два предохранительных клапана, два клапана выравнивания давления, три датчика давления, датчик дыма, вентилятор и лампы внутреннего освещения.

Корабль на орбите
На заднем днище отсека смонтированы пульты управления и аппаратура систем перекачки на МКС воды и газов. Для перевозки грузов в ЕРМ установлены восемь стандартных грузовых стоек, в каждой из которых для перевозки сухих грузов предусмотрены два отсека объемом 0.314 м3 и два отсека объемом 0.414 м3. Таким образом, общий объем сухих грузов может составлять 11.648 м3. На внешней поверхности переднего конуса ЕРМ установлена аппаратура обеспечения сближения и стыковки. На боковой поверхности ЕРМ закреплена откидывающаяся штанга с антенной системы ближней межбортовой радиосвязи РСЕ (Proximity Communication Equipment) между станцией и ATV (длина штанги с антенной – 2150 мм). Отсек ЕЕВ выполнен в виде цилиндра диаметром 4482 мм и высотой 570 мм. Внутри отсека установлен силовой набор, на котором крепятся три бака с водой, три баллона с газом и два блока дозаправки, каждый из которых состоит из одного бака окислителя (N2О4), одного бака горючего (НДМГ) и трех баллонов высокого давления с газом для вытеснительной подачи. В трех баллонах может доставляться газ двух наименований: один в двух

Сборка корабля
баллонах (66.6 кг), второй – в одном (33.3 кг). Управление перекачкой воды и газа и дозаправкой может осуществляться как экипажем МКС, так и из ЦУПа в Тулузе. Российская система стыковки имеет механические, электрические и информационные интерфейсы для работы корабля в составе станции, и обеспечивает дозаправку станции из баков ATV. SSA служит для размещения служебных систем ATV, обеспечивающих как автономный полет, так и стыковку с МКС и работу корабля в составе станции. SSA включает:
♦ приборный отсек ЕАВ (Equipped Avionics Bay);
♦ двигательный отсек ЕРВ (Equipped Propulsion Bay);
♦ адаптер разделения и отхода SDM (Separation and Distancing Module).
Корпус негерметичного отсека ЕАВ имеет коническую форму с максимальным диаметром 4482 мм, минимальным 4104 мм и высотой 1360 мм. Снаружи отсека установлены радиаторы системы терморегулирования, антенны навигационной системы GPS и связи через спутники-ретрансляторы TDRS. Внутри на приборной раме закреплены блоки радиоэлектронного оборудования и основных систем корабля, в том числе:
– четыре никель-кадмиевые аккумуляторные батареи с четырьмя блоками заряда и распределения питания PCDU (Power Conditioning and Distribution Unit);

Интерьер корабля
– отказоустойчивый компьютер FTC (Fault Tolerant Computer), составленный из трех блоков обработки данных DPU (Data Processing Unit);
– датчики системы наведения, навигации и управления, включая гироскопический блок и три акселерометра;
– два компьютера системы контроля и безопасности MSU (Monitoring and Safety Unit);
– аппаратура системы связи;
– четыре блока системы терморегулирования TCU (Thermal Control Unit);
– один блок системы управления и контроля CMU.
Негерметичный отсек ЕРВ имеет форму цилиндра диаметром 4104 мм и высотой 1970 мм. Снизу отсек закрыт коническим донным днищем высотой 475 мм. Внутри отсека установлены восемь топливных баков (четыре с монометилгидразином, четыре со смесью окислов азота) суммарной емкостью 6760 кг, два баллона с гелием для вытеснительной подачи топлива, арматура топливной системы и блок управления двигательной системы PDE (Propulsion Drive Electronics). В норме PDE запитана от блоков PCDU и получает команды от FTC. На боковой поверхности ЕРВ несет четыре панели солнечных батарей, установленные на одностепенных приводах системы ориентации на Солнце, а также 20 двигателей системы ориентации, объединенных в четыре блока по пять ЖРД. На нижнем днище закреплены четыре маршевых двигателя R-4D-11 (два основных и два резервных), запасной солнечный датчик и антенна системы «Курс». Снаружи отсек ЕРВ закрыт панелями противометеорной защиты MDPS. Переходник SDM имеет высоту 2.0 м и диаметр 3.94 м.

Сборка служебного модуля