Читать книгу "Люди на Луне"

Автор книги: Виталий Егоров (Zelenyikot)
Жанр: Прочая образовательная литература, Наука и Образование
Возрастные ограничения: 16+
сообщить о неприемлемом содержимом
Почему LRO не снизился, чтобы увидеть места посадки вблизи?
КРАТКИЙ ОТВЕТ: Космический аппарат LRO снижался примерно вдвое, чтобы рассмотреть места посадок Apollo и «Лунохода-2», но из-за высокой скорости полета качество снимков повышалось только в полтора раза.
Луна не имеет плотной атмосферы, и кажется, будто ничто не мешает космическим аппаратам летать низко над ее поверхностью, над вершинами самых высоких гор. Атмосфера не мешает, это верно, но мешает другое – масконы – неоднородности гравитационного поля Луны. Масконы приводят к быстрой деградации низких орбит космических аппаратов и их падению. Из-за масконов большинство окололунных зондов летали на высоте больше 100 км, а те, которые снижались, делали это на короткий срок и расходовали топливо на коррекцию орбиты.
Космический аппарат LRO летает по полярной эллиптической орбите высотой от 20 до 160 км и регулярно включает двигатели, чтобы корректировать ее. Нижняя точка орбиты проходит над южным полюсом Луны. Средняя высота полета составляет 50 км, с нее узкоугольная «дальнобойная» камера NAC LRO снимает поверхность с линейным разрешением 0,5 м.
Хотя 0,5 м – это довольно высокое качество, сравнимое с лучшими снимками Земли в картах Google и «Яндекса», все равно хотелось бы увидеть места посадок отчетливее. Особенно эффектно смотрелись бы отдельные следы астронавтов как лучшее свидетельство пребывания человека на другом космическом теле.
Космический аппарат LRO обладает необходимым запасом топлива и мог бы кратковременно снизиться, чтобы еще повысить разрешение снимков. Если сократить вдвое высоту, оптика камеры также удвоит разрешение до 0,25 м – его уже достаточно, чтобы рассмотреть отдельные следы людей в виде точек. Однако на камеру космического аппарата действуют другие ограничения, физические и технологические, которые делают бесполезным слишком низкий спуск.
Проблемы создает скорость летящего зонда. Чтобы получить достаточно резкие кадры, надо постараться, чтобы за время получения снимка (длительность выдержки или экспозиции) смещение камеры не превышало ее разрешающую способность. Проще говоря, если снимать поверхность Луны с разрешением 50 см, то за время съемки смещение космического аппарата не должно превышать 50 см. С похожей проблемой сталкивался практически каждый, кто пытался фотографировать пейзажи из окна быстро едущей машины или поезда: близкие объекты оказываются на снимках размазанными, хотя дальние остаются резкими. По этой же причине космический телескоп Hubble не снимает Землю: все его кадры окажутся размытыми из-за слишком быстрого движения телескопа над поверхностью Земли, на съемку которой он не рассчитан.
Каждая из двух камер NAC LRO оборудована сканирующей линейкой, состоящей из 5064 светочувствительных элементов (пикселей) в ширину и 42 элементов в длину. С высоты 50 км на каждый светочувствительный пиксель проецируется изображение поверхности площадью 0,5×0,5 м. Камеры снимают с экспозицией (выдержкой) от 35 до 0,34 миллисекунды, т. е. за это время каждый сканирующий фотоэлемент матрицы должен накопить достаточное количество фотонов, чтобы записать изображение и перейти к регистрации потока света со следующего квадрата местности.
Тут-то и сказывается скорость космического аппарата. На высоте 50 км скорость окололунного аппарата составляет 1656 м/с. Съемка с длинной выдержкой (35 миллисекунд) приведет к тому, что поверхность под спутником сместится на 58 м, на каждый пиксель запишется изображение тех же самых 58 м вместо 0,5 м и кадр будет «сжат» в направлении полета. Только самая короткая выдержка в 0,35 миллисекунды позволяет NAC LRO снимать достаточно резкие кадры с высоты 50 км.
На некоторых этапах полета LRO высота орбиты оказывается ниже 50 км. Даже в штатном режиме полета над экватором нижняя точка орбиты колеблется от 75 до 35 км. В нескольких случаях космический аппарат снижался еще ниже – почти до 21 км. Отсюда ему удалось сфотографировать место посадки Apollo 17 и советский «Луноход-2». Другие места пилотируемых прилунений удавалось снять с высоты 24–25 км, но удвоить разрешение снимков Луны не удалось из-за орбитальной скорости и ограниченной длительности экспозиции.

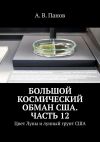
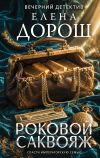
Луномобиль LRV Apollo 17 (слева) и последняя стоянка «Лунохода-2» (справа) – самые близкие к Луне кадры, снятые LRO с высоты 22 км. NASA
На самой короткой выдержке камера NAC LRO может нормально снимать не ниже 50 км. Снижение высоты полета вдвое приводит к сокращению вдвое и площади наблюдаемой поверхности, но выдержку вдвое укоротить уже невозможно, поэтому на каждый пиксель сканирующей линейки записываются те же 0,5 м, которые пролетают под космическим аппаратом за 0,35 миллисекунды.
Подобный эффект фотографы называют «роллинг шаттер»; он возникает, когда ПЗС-матрица не успевает записывать движение быстрого объекта. На современных фотокамерах такой дефект редко встречается, но не будем забывать, что LRO летает больше десяти лет, а электроника его камеры создавалась вообще в начале 2000-х.

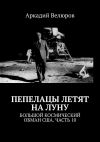
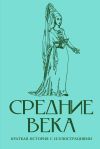
Место посадки Apollo 17, снятое LRO с высоты 138 км, 44 км и 22 км (слева направо). NASA

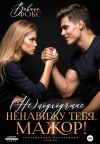
Самая лучшая на сегодня фотография места прилунения по программе Apollo (Apollo 17), снятая LRO с высоты 22 км. NASA
К счастью, этот эффект действует на лунную камеру только по длинной части кадра – в направлении полета, по ширине же разрешение удается повысить примерно до 0,25 м, т. е. вдвое. Так что снижением вдвое высоты полета LRO можно повысить качество снимка, но не в два раза, а примерно в полтора.
В съемке с высоты 50 км на каждый квадратный пиксель сканирующей линейки камеры NAC LRO попадает свет с поверхности Луны размером 0,5×0,5 м. Если же приблизиться к поверхности до 25 км, но не снизить вдвое скорость, то в каждый квадратный пиксель сканирующей линейки NAC LRO попадет свет с прямоугольника поверхности Луны размером 0,25×0,5 м, т. е. в направлении полета итоговое изображение будет сжато. Восстановить полученное изображение до нормального несложно – достаточно растянуть кадр вдвое. В результате фотография получается выше качеством, чем с высоты 50 км, но, поскольку простое «растяжение» не добавляет новой информации, итоговое разрешение снимка оказывается где-то между 0,25 и 0,5 м. NASA осторожно указывает линейное разрешение в 0,4 м снимков с высоты ниже 25 км.
Хотя результат не соответствует всем ожиданиям, но на кадрах можно рассмотреть немало подробностей, которые не видны в других случаях.
Так, на снимке Apollo 17 с высоты 22 км можно рассмотреть ранцы системы жизнеобеспечения скафандров астронавтов. Ранцы выбросили на поверхности Луны, после того как подключили скафандры к системе жизнеобеспечения лунного модуля. Это сделали для того, чтобы избавиться от лишнего груза при взлете.

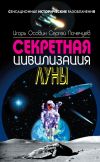
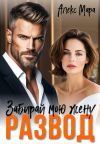
Лунная поверхность в месте посадки Apollo 14 с зонда LRO (вверху) и панорама из иллюминатора лунного модуля (внизу). NASA
На этом же снимке можно рассмотреть лунный автомобиль LRV, который остановили в отдалении от лунного модуля. На ровере устанавливалась камера, управляемая с Земли. Ее использовали, чтобы наблюдать старт корабля.
Съемка Apollo 14 с высоты 25 км позволяет рассмотреть установленную параболическую радиоантенну для телетрансляции. Рядом видна тележка, которую астронавты использовали для доставки научного оборудования. Тень установленного флага не видна из-за того, что его полотнище развернуто точно на запад, что делает тень тонкой и малозаметной при высоком солнце.
Как заработать на Луне и «Аполлоне»?
КРАТКИЙ ОТВЕТ: Сегодня существует несколько частных компаний, которые планируют запуски на Луну, и одна из них собирается посетить место посадки Apollo 17.
Интервью с Робертом Бёме – основателем немецкой частной космической компании PTScientist, которая строит и готовит к запуску луноход к месту посадки Apollo 17. Текст интервью был ранее опубликован в кн.: Егоров В. Делай космос! – М.: АСТ, 2018.
За содействие в организации интервью выражаю признательность основателю сервиса для запуска спутников на орбиту Precious Рayload Андрею Максимову
В 2007 году американский фонд XPrize совместно с Google объявил конкурс Google Lunar XPrize. Согласно условиям конкурса, необходимо создать транспортное средство и доставить его на Луну, где оно должно преодолеть 500 м и передать на Землю 500 мегабайт данных. Победителю был обещан основной приз в $25 млн и до $5 млн дополнительных. В числе дополнительных призов стоимостью $1 млн была задача фотосъемки мест исторических посадок на Луну. Более 20 команд со всего мира решили принять участие в конкурсе, в том числе и немецкая PTScientist.
Команда из Германии занялась разработкой и подготовкой к запуску сразу двух луноходов и задалась целью посетить места посадки Apollo 17. И это лишь начало; в их дальнейших планах – бизнес по доставке на Луну полезной нагрузки от заказчиков со всего мира. Пока их луноход Audi Lunar Quattro снимается в рекламе и кино, но ракета-носитель Falcon 9 уже арендована и пуск ожидается в течение двух-трех лет. Мне удалось встретиться с основателем компании Робертом Бёме (Robert Boehme) и узнать, как развивался их проект и что движет его стремлением в межпланетный бизнес.
PTSCIENTISTS (PART-TIME SCIENTISTS)
– Для начала несколько слов, кто мы такие. Частная космическая компания PTScientists (Part-Time Scientists, «Ученые по совместительству») существует уже 9 лет. Мы начали развивать нашу технологию и построили несколько космических аппаратов и несколько роверов. На сегодня уже разработано четвертое поколение лунохода PTScientists.
– Вы работаете с DLR [Немецкое космическое агентство]?
– Да, мы работаем с DLR и с Европейским космическим агентством с 2010 года.
– И четыре поколения космических аппаратов разработали вместе с ними?
– Нет, мы работаем с ними, но разрабатываем самостоятельно.
– Кем оплачивалась эта работа?
– Начали мы на частных инвестициях, эту технологию разрабатывали для себя и, по сути, сами выступали заказчиками. Как, например, SpaceX разрабатывали технологию для себя [вероятно, имеется в виду технология многоразовости]. Первые три года работали исключительно на деньги частных инвесторов. Деньги вложены были мои личные, моих хороших друзей. Они позволили прожить компании до 2010 года, до появления первых контрактов.
Затем были спонсорские взносы, небольшие и более крупные, затем промежуточные призовые от Google Lunar XPrize. Проблема с конкурсом была в том, что ранее заявленные условия соревнования не работали. Обещанный в далекой перспективе крупный приз оказался недостаточно привлекательным, нужно было стимулировать постоянную работу и оплачивать прохождение отдельных отрезков пути участниками соревнования. Google выделил два приза общей суммой $750 000 [$250 000 за разработку камеры, и $500 000 за разработку ровера]. Это очень сильно помогло. Они не давали нам наличные, но обеспечили нашу платежеспособность.
Очень важное достижение для нас – это начало работы с Европейским космическим агентством (ESA). Google не мог напрямую оплачивать наши услуги из-за ограничений ITAR [International Traffic in Arms Regulations – американские ограничения распространения военных технологий], поэтому он оплатил услуги Европейского космического агентства, чтобы оно испытало наши технологии. ESA потребовалось 18 месяцев на все проверки. Специалисты ESA провели весь спектр испытаний и электроники, и механики, и компьютерных систем. Термовакуумные, радиационные, вибродинамические…
– Тестировали уже готовые изделия или элементы?
– Когда как, иногда тестировались отдельные подсистемы, иногда проходили испытания завершенных систем. Полному испытанию подвергся ровер – это было еще предыдущее поколение. Вместе со специалистами ESA мы выехали на вулканический кратер на острове Тира [вулкан Санторин]. Очень сложно провести полный тест для перелетного модуля, поэтому его тестировали по подсистемам.
Стоит сказать о целях миссии. Главная цель, и это важно, не менялась на протяжении всех девяти лет – реализовать первую частную миссию к месту посадки Apollo.
В нашей команде я единственный, кто не является космическим инженером. Я специалист в информационной безопасности. Благодаря этому мой взгляд на космонавтику немного отличается от остальной команды. Я очарован космосом, но девять лет назад меня разочаровывал низкий прогресс в его освоении. Тогда еще не было заметных успехов SpaceX. И тогда я сам занялся космонавтикой, хотя понимал, что для этого потребуется немало времени. У нас была цель, но не было даже названия. Когда присоединились Audi и Vodafone, было выбрано название – Mission to the Moon.

Модификации лунохода. PTScientist
Сейчас у нашей программы две основные цели.
Первая – научная, для ее реализации мы работаем со многими космическими агентствами по всему миру: Немецкое космическое агентство, европейское, канадское, шведское, марокканское и NASA, конечно. Их научный интерес – проанализировать останки Apollo, понять, что произошло с материалами, которые находились неприкосновенными на Луне в течение 45 лет. Наша цель – осмотреть лунный ровер и узнать, что произошло с материалами, причем некоторые из них сегодня в космонавтике уже не используются: алюминий, пластик, полиэтилен, липкая лента, рояльная струна [в колесах роверов LRV].
Вторая цель – техническая, мы стремимся облегчить освоение космоса с технологической стороны. Первая миссия используется для проведения летных испытаний нашего космического аппарата ALINA и лунохода. Оба этих аппарата – развитие инфраструктуры для обеспечения доступа к Луне для любого заказчика.
Для того чтобы заручиться поддержкой Немецкого и Европейского космических агентств, нам потребовалось подтвердить реальность технологии. После испытаний, проведенных на средства Google, мы смогли подтвердить космическую квалификацию нашего оборудования. И это было очень важно для дальнейшего вовлечения Audi. Переговоры с ними продолжались три с половиной года, но безрезультатно – просто мы общались не с теми людьми из Audi. Они занимали позицию: «Мы можем делать маркетинг сами, вы нам не нужны». Для них мы были никем. Только после победы в промежуточных этапах Google XPrize и прохождения космической сертификации мы приобрели публичный вес.
Переговоры с Audi сдвинулись с мертвой точки и продолжались 18 месяцев до подписания первого договора. Главный страх Audi был в том, что людям это не интересно. Они не были уверены, что космос на самом деле интересен. Изменить к лучшему это отношение мы смогли при помощи нашей победы на Каннском фестивале [PTScientist получили бронзового каннского льва в 2015 году в категории творческих инноваций в маркетинге]. Эффект был экстремально сильным. Финансовый эффект этой рекламной кампании втрое перекрыл затраты на нее в первые пятнадцать минут с момента начала. Это было еще до того, как мы стали сотрудничать с технической лабораторией Audi. С тех пор мы работаем с ними уже три года и достигли выдающихся результатов.
Вот для примера реальное колесо ровера. Оно не такое стильное, как на наших официальных фото и видео, но на Луне будут использоваться именно такие. Колеса из презентаций мы называем «забавная обувь для официальных мероприятий».
– Почему вы назвали космический аппарат ALINA?
– Это моя идея, я решил впервые в истории космонавтики дать женское имя космическому аппарату. Разумеется, это аббревиатура, она означает Autonomous Landing and Navigation Module [ «Автономный посадочный и навигационный модуль»]. Она очень важна для реализации нашей программы. Пока никто не возвращался на место посадки…
– Apollo 12?
– Да, они прилетели к месту посадки Surveyor 3 через 16 месяцев после его посадки. Мы же вернемся через 45 лет. Кроме того, они сели слишком близко к модулю и загрязнили его поверхность своим реактивным выхлопом во время посадки.
Сотрудничество с Audi означало для нас новый уровень работы. Она стала более организованной. Кроме того, они дали нам свои технологии. Вот это колесо – это технологии Audi. Это 3D-печать из алюминий-магний-кремниевого сплава. Около 80 % лунохода и некоторые элементы посадочной платформы изготовлены из этого сплава. Он очень легкий, с ним ровер стал легче на 10 кг, больше и легче. Как оказалось, менеджеры Audi, с которыми мы работали, даже не знали, что у них есть такие технологии в лаборатории. И, конечно, они поддержали нас финансово. Многие компании были готовы дать свое имя, но не деньги. Компания Audi тоже начала с предложения имени, но маркетологи компании определили высокий маркетинговый эффект от сотрудничества и пошли на финансирование. Сейчас с каждым годом наше сотрудничество расширяется и в технологиях, и в маркетинге, и в финансировании.
После того как на ровере появился логотип Audi, компания приобрела первого клиента. Сегодня несколько заказчиков оплатили размещение своей полезной нагрузки на борту ALINA, в том числе NASA Ames, Канадское и Шведское космические агентства. Для первой миссии мы продаем доставку каждого килограмма за €750 000.
– Сколько полезной нагрузки вы можете доставить?
– ALINA обеспечивает доставку 100 кг на поверхность Луны. Но два ровера и система их выгрузки занимают около 70 кг, поэтому мы имеем возможность выставить на продажу 30 кг нагрузки. Сейчас у нас осталось свободных 13 кг. Полезная нагрузка крепится на две панели на борту спускаемого аппарата. Используется стандартный формат CubeSat [формат малых (сверхмалых) искусственных спутников Земли для исследования космоса, имеющих объем не более нескольких литров и массу в единицы килограммов], и нагрузка размещается либо в типовые контейнеры, либо остается на панели и подключается через стандартный интерфейс CubeSat. Мы можем выгрузить спутник на окололунной орбите, можем оставить полезную нагрузку на борту ALINA после посадки и можем сбросить ее в реголит. Один спутник у нас уже выкупили для запуска на орбиту, и один CubeSat 3U мы сбрасываем на грунт после посадки.
Наша бизнес-модель предполагает продажу полного пуска или же продажу мест для полезной нагрузки на каждом запуске. Первый полет мы реализуем в качестве демонстрации наших возможностей. При загрузке 100 кг по €750 000 каждый выручка с одного полета должна составлять €75 млн. Первый пуск обходится примерно в €50 млн, поэтому этот бизнес обещает приносить прибыль.
Самая дорогая статья расходов – это пуск. Стоимость космического аппарата довольно низкая, потому что мы используем коммерчески доступные компоненты (COTS).
– Какова полная масса космического аппарата?
– Полная сухая масса ALINA со всей полезной нагрузкой, но без топлива – 330 кг. Заправленная полетная масса – 1 250 кг. В ней 920 кг топлива.
– Вам требуется выведение на низкую околоземную орбиту?
– Геопереходную. Мы уже арендовали один пуск SpaceX в ближайшие годы. Интересно, что наш аппарат занимает не более полутора тонн на ракете, а остальной запас массы, около 4 т, мы можем выделить под коммерческий или исследовательский спутник. Еще важно, что ALINA специально разработана так, чтобы разместиться практически на любой коммерчески применяемой космической ракете. Для нас Falcon 9 предлагает лучшие возможности, но мы также рассматривали российский «Днепр» и индийскую PSLV [Polar Satellite Launch Vehicle, «Ракета-носитель для вывода спутников на полярную орбиту»].
Для крупных производителей вроде корпорации Arianespace наша платформа может быть интересна в качестве основы для их собственного производства по схеме OEM [Original equipment manufacturer – субподрядчик, производящий технику для заказчика, который продает ее под своей торговой маркой]. В таком случае мы берем на себя разработку и поддержание платформы. Об ALINA можно сказать, что это не оптимальный с точки зрения техники космический аппарат, но очень удобный с точки зрения бизнеса. Для примера, компания SpaceX подтвердила возможность пуска всего четыре месяца назад. За это время мы смогли адаптировать космический аппарат под ракету-носитель Falcon 9, хотя ранее он был уже подготовлен для запуска на PSLV XL.
Сотрудничество с Vodafone – это первый пример, когда коммерческий партнер инвестирует в развитие инфраструктуры на Луне. Партнерство с Audi у нас самое долгое, но Vodafone заинтересована во всех последующих полетах наших аппаратов. Они хотят развернуть 4G LTE сеть на Луне. С каждой нашей миссией на Луну LTE покрытие будет расширяться, и каждый сможет использовать эту систему для телеметрии и триангуляции. Это будет стандартный LTE, не какой-нибудь лунный подстандарт. Это позволяет всем желающим разрабатывать технологии на основе этой сети, и уже миллионы устройств разработаны для этой цели. У нас есть еще один партнер – мобильный оператор, но мы пока не называем его. Они планируют приобрести один слот под CubeSat, чтобы разместить на него обычный смартфон, который позвонит домой.
Мы технологическая компания, которая развивает инфраструктуру на Луне, и мы заинтересованы в участии в таких проектах ESA, как Moon Village [проект Европейского космического агентства строительства базы на Луне]. Наша цель – участие в таком строительстве.
– Как вы планируете решать проблему навигации на лунной орбите?
– Мы хотим задействовать сеть наземных станций ESA Estrack. Бортовой компьютер ALINA позаимствован из стандартных коммерческих спутников и очень похож на тот, что использовался на ATV [автоматических грузовых космических кораблях Европейского комического агентства].
Возможно, вам будет интересно узнать и о двигательной установке. Сопла, трубопроводы, баки и система управления позаимствованы тоже у ATV. Это привлекательное решение, так как все данное оборудование уже прошло летные испытания и сертифицировано к использованию в пилотируемых миссиях.
– Какую частоту вы используете для передачи данных?
– Мы используем X-диапазон и S-диапазон для связи с Землей и LTE для связи у поверхности.
– LTE используется между луноходом и платформой?
– Да, и еще между платформой и отделяемой полезной нагрузкой. Между ровером и платформой можно поддерживать связь по LTE на дальность до 15 км. Ровер тоже имеет антенны X– и S-диапазона, но они резервные, поскольку LTE требует гораздо меньше энергии на передачу. Для высокоскоростной передачи с ровера на Землю в X-диапазоне требуется 40 ватт, это очень много. Для передачи в LTE потребуется 1–2 ватта.
– Будете делать свой ЦУП?
– Да, мы сейчас работаем с компанией, которая готовила программное обеспечение для ЦУП миссии Rosetta. У нас есть центр разработки площадью примерно 25 000 кв. м, в Берлине, там же будет и ЦУП, и мы еще ищем площадку для резервного.
– Посадочная система проходила полные испытания?
– Частичные проходила. Полные испытания мы моделируем программно. Тестируется два типа посадки: баллистический, по схеме Surveyor [беспилотный космический аппарат NASA 1966–1968 годов], и интеллектуальный, на основе видеосистемы, анализирующей поверхность на предмет кратеров или камней.
– Планируете делать полный тест?
– Частично мы уже его провели, а также провели полную сборку инженерной модели, тест на падение, и впереди еще много испытаний. Важная причина, по которой мы выбрали место посадки Apollo 17, в том, что это самая исследованная область на Луне. Имеются высококачественные спутниковые карты: спутник LRO сделал над этим местом очень глубокий нырок к поверхности и получил снимки разрешением 45 см. И нам это на руку, ведь если мы спускаемся по баллистической схеме, то статистически камни в месте посадки могут повредить посадочный модуль менее чем в 5 % случаев.
Мы выбрали место в 3–5 км от Apollo 17 и работаем с NASA, чтобы показать, что не повредим их модуль при посадке. Поэтому мы выбрали ровер: он позволяет получить научные материалы, сделать снимки, но при этом не приближаться к посадочной ступени Apollo ближе 200 м. С нашей помощью NASA смогло разработать процедуры взаимодействия со всеми частниками, которые желают запустить свои луноходы к Apollo.
Я считаю, что Apollo – хорошая цель, потому что вдохновляет людей. Разумеется, я уверен, что они там были. Мне кажется, если показать, что полеты на Луну были реальностью в 1960–1970-е, то это привлечет больше внимания к космосу и сегодня.
Внимание! Это не конец книги.
Если начало книги вам понравилось, то полную версию можно приобрести у нашего партнёра - распространителя легального контента. Поддержите автора!