Текст книги "Введение в теорию риска (динамических систем)"
Автор книги: Владимир Живетин
Жанр: Прочая образовательная литература, Наука и Образование
Возрастные ограничения: +12
сообщить о неприемлемом содержимом
Текущая страница: 10 (всего у книги 27 страниц) [доступный отрывок для чтения: 8 страниц]
2.5. Устойчивость по Лагранжу. Области допустимых и критических состояний
Квазистационарная (регулярная) динамикаКак сказано выше, если состояние динамической системы задано в метрическом пространстве D, то это пространство называется фазовым [54]. Время t может быть непрерывным, т. е. t  R1, либо дискретным – t Z.
R1, либо дискретным – t Z.
Сформулируем один из фундаментальных законов теории динамических систем – отображение любой заданной точки х в фазовом пространстве D при любом значении t в однозначно определенное состояние φ(t, x) D удовлетворяет следующим теоретико-групповым свойствам:
1) φ(0, x) = x;
2) φ(t1, φ(t2, x)) = φ(t1 + t2, x);
3) φ(t, x) непрерывно по x.
Если t R1, то имеет место непрерывная динамическая система или поток. Фиксируя х и изменяя t в диапазоне (–∞, ∞), получим фазовую траекторию, для которой ориентация индуцируется направлением движения.
Приведем классификацию фазовых траекторий:
– траектории, соответствующие состоянию равновесия;
– периодические;
– незамкнутые: положительные полутраектории, когда {x : φ(t, x), t ≥ 0}, отрицательные – когда {x : φ(t, x), t < 0}.
Если отображение φ(t, x) – взаимно однозначное, дифференцируемо, обратное к которому тоже дифференцируемо (т. е. обладает диффеоморфизмом), то непрерывная динамическая система или поток представляет собой гладкую динамическую систему. При этом фазовое пространство D имеет некоторую гладкую структуру. Это позволяет установить (если D  Rn) соответствие между гладким потоком и векторным полем, вводя поле скоростей следующим образом:
Rn) соответствие между гладким потоком и векторным полем, вводя поле скоростей следующим образом:

По определению, траектории гладкого потока являются траекториями динамической системы, заданной управлением системы  = X(x), т. е. гладких динамических систем. Дискретные динамические системы, как правило, называют каскадами. При этом φ(t, x) = ψt(x), где ψ(x) – гомеоморфизм φ(1, x), тогда ψt(x) =
= X(x), т. е. гладких динамических систем. Дискретные динамические системы, как правило, называют каскадами. При этом φ(t, x) = ψt(x), где ψ(x) – гомеоморфизм φ(1, x), тогда ψt(x) =  .
.
Последовательность точек  , где xk+1 = ψ(хk), называется траекторией точки x0.
, где xk+1 = ψ(хk), называется траекторией точки x0.
Типы траектории:
1) x0 – неподвижная точка гомеоморфизма ψ(x), которая отображается при помощи ψ(x) в себя;
2) циклическая;
3) бесконечная в обе стороны.
Если ψ(x) – диффеоморфизм, то такая дискретная динамическая система называется гладкой. Таким системам соответствуют модели
= X(x, t),
где X(·) – непрерывная в Rn × R1, гладкая по х и периодическая по t с периодом τ функция.
Введем множества допустимых Ωдоп и критических Ωкр состояний динамической системы.
Множество Ωдоп(х) называется допустимым (инвариантным) относительно динамической системы, если Ωдоп для любого t обозначает множество Uφ(t, x). При этом если x Ωдоп, то траектория φ(t, x) принадлежит множеству Ωдоп.
Точка x0 называется критической (блуждающей), если существует открытая окрестность Ωкр(х0) и такое положительное Т, что
Ω(х0) ∩ φ(t, Ωкр(х0) = Φ при t > T,
отсюда следует
φ(–t, Ωкр(х0)) ∩ Ωкр(х0) = Φ при t < T.
Обозначим множество возможных значений х для данной динамической системы через Ω. Тогда множество допустимых (не блуждающих) значений х Ωдоп = Ω Ωкр.
При введенных выше предположениях Ωкр является открытым и инвариантным. Множество Ωдоп содержит следующие точки: состояния равновесия, принадлежащие периодическим траекториям; все точки двоякоасимптотических траекторий в случае, если при t → ±∞ они принадлежат состояниям равновесия и периодическим траекториям; принадлежащие устойчивым по Пуассону траекториям.
При описании множества Ωкр часто целесообразно использовать понятие аттрактора.
Определение. Аттрактор (А) – это замкнутое инвариантное множество, имеющее такую окрестность или поглощающую область U(Α), что траектория φ(t, x) произвольной точки х, принадлежащей U(A), удовлетворяет условию
ρ(φ(t, x), A) → 0 при t → +∞,
ρ(x, A) = inf ||x – x0||, x0 A.
Примеры аттракторов: состояние устойчивого равновесия; устойчивые периодические траектории и т. п.
Все понятия устойчивости динамической системы [9, 16, 39, 40] в той или иной мере связаны с построением области Ωдоп и, соответственно, Ωкр динамических систем, описываемых линейными и нелинейными дифференциальными уравнениями вида = f(x, t), которым соответствует траектория Tt x динамической системы Tt или f(t, ·).
Одно из важных свойств системы в процессе движения – оставаться в ограниченной области Ωдоп фазового пространства. Подобный подход представлен в рамках теории устойчивости по Лагранжу.
Пусть динамическая система задана на метрическом пространстве S Rn, тогда устойчивость по Лагранжу эквивалентна ограниченности траектории Х, т. е. Х Ωдоп. При этом у динамической системы с оператором  , заданной на метрическом пространстве S, все точки траектории Ttx содержатся в некотором предкомпактном множестве.
, заданной на метрическом пространстве S, все точки траектории Ttx содержатся в некотором предкомпактном множестве.
Предкомпактное пространство, вполне ограниченное пространство, является равномерным пространством Х для всякого окружения U. Таким образом, для всякого окружения U X должно найтись такое конечное множество F X, что X U(F). Если действительные части всех собственных значений матрицы производных  отрицательны, то неподвижная точка x0 уравнения = f(x) экспоненциально устойчива.
отрицательны, то неподвижная точка x0 уравнения = f(x) экспоненциально устойчива.
Отсюда следует, что совокупность точек x0 образует множество устойчивых, или допустимых, точек, если выполняется критерий устойчивости состояний автономной системы. Если при тех же условиях хоть одно из собственных значений производной имеет положительную действительную часть, то неподвижная точка x0 дифференциального уравнения = f(x) неустойчива.
1. Предельное множество динамической системы.
Пусть в фазовом пространстве существуют множества А и В, где B A, А – совокупность всех точек  фазового пространства, для которых
фазового пространства, для которых  В при t → ∞ или t → –∞. Тогда B называется предельным множеством динамической системы.
В при t → ∞ или t → –∞. Тогда B называется предельным множеством динамической системы.
2. Типы множеств В.
Если все А стремятся к В при t → +∞, то множество В является притягивающим и называется аттрактором, а множество А – бассейном притяжения аттрактора.
Если точки А стремятся к В при t → –∞, то множество В является отталкивающим и называется реплером.
Множество А может состоять из двух подмножеств А1 и А2 – устойчивого и неустойчивого соответственно, которые будем обозначать Ωдоп и Ωкр (безопасным и опасным). При этом точки, принадлежащие А1, стремятся к B в прямом времени, а принадлежащие А2 – в обратном времени.
Область устойчивости или область допустимых состояний динамической системы зададим с помощью следующего определения.
Определение. Множество в пространстве значений параметра Х, от которого зависит задача Коши, не являющееся в общем случае областью, есть объединение компоненты связности внутренности множества S значений параметра, при которых решение задачи Коши устойчиво по Ляпунову, и множества тех точек границы этой компоненты, которые принадлежат S.
Существуют следующие определения устойчивости: устойчивость по Ляпунову, асимптотическая устойчивость, орбитальная устойчивость, устойчивость по Пуассону.
I. Устойчивость по Ляпунову на языке (ε, δ).
Фазовая траектория  является устойчивой по Ляпунову, если для любого произвольно малого ε > 0 существует такое δ(ε) > 0, что для любой траектории , для которой ||
является устойчивой по Ляпунову, если для любого произвольно малого ε > 0 существует такое δ(ε) > 0, что для любой траектории , для которой || –
–  || < δ, для всех t > t0 выполняется неравенство || – || < ε, где ||…|| обозначает норму в Rn. Таким образом, малое начальное возмущение устойчивых по Ляпунову фазовых траекторий не возрастает с течением времени.
|| < δ, для всех t > t0 выполняется неравенство || – || < ε, где ||…|| обозначает норму в Rn. Таким образом, малое начальное возмущение устойчивых по Ляпунову фазовых траекторий не возрастает с течением времени.
Более сильное требование принято называть асимптотической устойчивостью, когда малое возмущение δ со временем уменьшается, т. е. || – || → 0 при t → ∞.
Отметим, что траектория, устойчивая по Ляпунову, всегда орбитально устойчива. Самое слабое требование имеет место в устойчивости фазовой траектории по Пуассону, когда предполагается, что не покидает ограниченной области Ωдоп( ) фазового пространства при t → +∞. При этом возвращается в сколь угодное малую окрестность начальной точки. Подчеркнем, что смена режима функционирования системы изменяет характер устойчивости и предельного множества.
) фазового пространства при t → +∞. При этом возвращается в сколь угодное малую окрестность начальной точки. Подчеркнем, что смена режима функционирования системы изменяет характер устойчивости и предельного множества.
Используя понятие устойчивости по Ляпунову, мы можем построить множество Ωдоп(х)0 точек x0 следующим образом.
Пусть дано отображение f : S → S, где (S, d) – метрическое пространство. Точка х0 S называется устойчивой по Ляпунову относительно отображения f, если для всякого ε > 0 найдется δ > 0 такое, что для всякого х S, удовлетворяющего неравенству d(x, x0) < δ, выполнено неравенство d(ftx, ftx0) < ε для всякого t N.
Если f – отображение компактного топологического пространства S в себя, то х0 S называется устойчивой по Ляпунову относительно отображения f, если она становится таковой в результате наделения пространства S некоторой метрикой.
Существуют иные определения устойчивости по Ляпунову:
1) в векторном топологическом пространстве Е;
2) на римановом многообразии U (евклидово или гильбертово пространство);
3) на равномерном пространстве Е.
II. Области допустимых и критических состояний автономной динамической системы с управляющим параметром.
Выделим три области состояния динамической системы, в которых под действием малых возмущений отклонения траектории от невозможного движения:
– уменьшаются (область Ω1);
– ограниченные (область Ω2);
– растут (область Ω3).
Установим связь между свойствами динамической системы, в том числе вектором управляющих параметров  , отображающими внутренние свойства системы, и областями Ωi (i = 1, 2, 3).
, отображающими внутренние свойства системы, и областями Ωi (i = 1, 2, 3).
Пусть состояние автономной динамической системы описывается моделью вида

где  Rn; Rm – вектор параметров, отображающий внутренние свойства системы.
Rn; Rm – вектор параметров, отображающий внутренние свойства системы.
Рассмотрим частное решение  системы (2.11). Пусть отклонение
системы (2.11). Пусть отклонение  от частного решения х0 мало и такое, что = + . При этом из (2.11) получим
от частного решения х0 мало и такое, что = + . При этом из (2.11) получим

Учитывая, что  мало, при разложении
мало, при разложении  в ряд ограничимся только линейными членами. В итоге получим
в ряд ограничимся только линейными членами. В итоге получим

где A(·) – матрица с элементами

fi(·) – компонента функции . Матрица А называется матрицей линеаризации системы в окрестности решения  .
.
Матрица А характеризуется собственными векторами  и собственными значениями λi такими, что
и собственными значениями λi такими, что

Собственные значения λi являются корнями характеристического уравнения
det | A – λE | = 0,
где Е – единичная матрица.
Отклонение y(t*), заданное в момент времени t*, меняется вдоль согласно зависимости:

При этом вещественная часть λi играет решающую роль. В рассматриваемом случае A = A(, ; t), т. е. зависит от (, ; t). Это означает, что λi = λi(t; , ), и при изменении t изменяется : экспоненциально растет, и траектория лежит в Ω3, когда λi > 0  , и уменьшается в Ω1 – когда λi < 0 .
, и уменьшается в Ω1 – когда λi < 0 .
Рассмотрим в качестве примера состояние равновесия для частного решения , когда  . При этом А рассчитывается только в одной точке фазового пространства, а параметры не зависят от времени. Тогда aij = const, соответственно, собственные векторы и собственные значения А постоянны во времени.
. При этом А рассчитывается только в одной точке фазового пространства, а параметры не зависят от времени. Тогда aij = const, соответственно, собственные векторы и собственные значения А постоянны во времени.
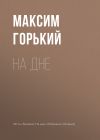
В двумерном случае рассмотрим на плоскости след матрицы А: SpA = λ1 + λ2 при различных значениях λ1 и λ2 (больше нуля, меньше нуля, комплексные).
На рис. 2.6 изображены траектории, соответствующие каждому из следующих случаев на фазовой плоскости:
1) устойчивый узел (λ1 < 0, λ2 < 0 – вещественные);
2) устойчивый фокус (λ1, λ2 — комплексно-сопряженные числа, действительная часть Reλ1 которых меньше нуля);
3) неустойчивый фокус (Reλ1 и Reλ2 больше нуля);
4) неустойчивый узел (λ1 > 0, λ2 > 0 – вещественные);
5) центр (λ1 и λ2 – чисто мнимые);
6, 7) седло (λ1, λ2 – вещественные с различными знаками).
Процедура перехода от нелинейных к линейным уравнениям связана с использованием fi – производных первого порядка, а также x0 = x(t0) – значений параметров, вычисленных в момент времени t0 (в момент линеаризации). При этом значения aij должны принадлежать области значений [aнij,aвij], где aнij; aвij – минимальные и максимальные значения aij, т. е. принадлежат заданной области Ωдоп. При этом величины λ1, λ2 – корни уравнения: λ2 – SpA · λ + detA = 0.

Рис. 2.6
Таким образом, область безопасных или допустимых состояний динамической системы, описываемой нелинейной системой дифференциальных уравнений (2.11), включает множество точек (x, λ), в которых рассматриваемое уравнение F(x, λ) = 0
– имеет единственное решение, зависящее от λ;
– обладает устойчивыми решениями.
Глава III. Интеллектуально-энергетические системы. Вводные положения, модели
3.1. Структурный синтез функциональных свойств динамических систем иерархии
Структурный синтез функциональных свойств динамических систем связан с исследованием функциональных свойств динамических систем, обеспечивающих достижение цели, в трех пространствах:
– реальном;
– перцептуальном;
– абстрактном (концептуальном).
В концептуальном – абстрактном, символическом – пространстве формируются модели различного уровня достоверности отображения объектов бытия из реального пространства.
Всем объектам бытия, представляющим динамические системы, свойственно деление на микро– и макрообъекты. Соответственно, науки, изучающие тот или иной класс динамических систем, включают различные системы знаний.
3.1.1. Иерархия динамических системРассмотрим на системно-иерархическом уровне динамические системы среды, в которую погружен человек. Рассмотрим системы и объекты различных свойств, сложности, которые воздействуют на человека.
В силу того, что человек в сильной мере зависит от своей энергии, в том числе ноосферной [26], которая задает ритм функционирования цели и смысла жизни с помощью энергий контроля и управления, а также формирования соответствующих решений и команд по их реализации, при изучении человека его следует рассматривать как объект, находящийся под влиянием энергетических полей геосферы и биосферы или погруженный в них [41, 43].
Для изучения состояния иерархии указанных динамических систем необходимо объединить разноуровневые знания, обусловленные свойствами этих систем, т. е. создать систему знаний.
Первый уровень – Вселенная, которая влияет на человека не столь очевидно, как биосфера. Однако необходимо учитывать эту систему, а при необходимости имитировать ее влияние, например, в виде возмущающих факторов, влияющих на работу психоэнергетики человека.
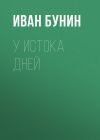
Вселенная создала систему управления своим энергетическо-информационным потенциалом θ = (E, J, m); результаты структурно-функционального синтеза системы управления представлены на рис. 3.1. 3десь необходимы знания о подсистеме (1), представляющей собой источник строго дозированной по определенному закону информации J1, которая в подсистеме (2) формирует управления энергетическим полем, включающим Вселенную (3), и телами, ее наполняющими. В процессе этого формируется единое энергетическо-информационное пространство. Подсистема контроля (4) создает информационно-энергетические сигналы (J4, Е4) рассогласования для подсистем управления (1) и (2).

Рис. 3.1
Если такая позиция имеет место быть, то нам следует согласиться с тем фактом, что во времени и энергиях живут человек и живое вещество, все остальное имеет отсчет в энергиях. Жизнь этноса отсчитывается во времени и в запасах его энергии, организованности ее расходования.
Второй уровень – геосфера.
Система управления информационно-энергетическим потенциалом геосферы, синтезированная на структурно-функциональном уровне, приведена на рис. 3.2. Система включает: подсистему (1), формирующую цель функционирования в виде законов движения; подсистему (2), формирующую исполнение законов посредством энергии управления; подсистему (3) – реализацию, например, заданного положения геосферы в космосе; подсистему (4), которая формирует энергию контроля для устранения отклонений от заданной цели согласно законам природы.
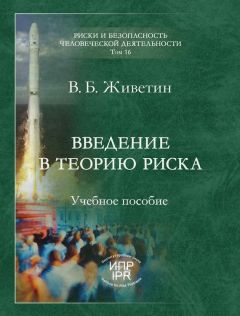
Третий уровень – биосфера (рис. 3.3) [18], в которой преобладает роль живого вещества и соответствующей ему энергетики.
Биосфера как управляющая информационно-энергетическая система, синтезированная на структурно-функциональном уровне, приведена в виде схемы на рис. 3.3.
Согласно приведенной схеме, необходимы знания:
– о законах, регулирующих взаимоотношение живого вещества и их жизнь (J1, E1) (подсистема 1);
– об энергии управления (Е2, J2) (подсистема 2);
– о состоянии биосферы (E3, J3), при котором возможна жизнь и развитие живого вещества, в том числе энергии воспроизводства (подсистема 3);
– об энергии контроля (E4, J4), направленной на устранение недопустимых отклонений от заданных значений (E3, J3), согласно законам, или выхода в критическую область (подсистема 4).

Рис. 3.2

Рис. 3.3
На Земле главное – геосфера, это основа всего, из нее возникла биосфера и в итоге человечество (этносфера). Каждая планета обладает своим объемом информации, имеющимся внутри нее, в совокупности образующим информационное поле Вселенной. Возможно, Земля – наиболее сложное тело в физической Вселенной. На первый взгляд, Солнце, состоящее из гелия и водорода, кажется более простым, однако до сих пор об этом «простом» объекте люди не могли получить исчерпывающих знаний.
Четвертый уровень – социосфера. Для осмысления социо-сферных приобретений и потерь необходимо иметь все компоненты социосферных знаний, а также иметь совокупность факторов, от которых они зависят (см. рис. 3.4).

Рис. 3.4
Социальная энергия (3) и подсистема контроля (4) приносят нам исходную посылку в виде чувственных моделей, которые в духовном мире (1) порождают следующие процессы: принятие или непринятие полученного; рождение мысли, идеи для подсистемы (2), содержащей духовную направленность поиска. Командно-управляющая подсистема, анализируя мысль в ее духовном сопровождении, порождает методы решения прикладных задач в социо-сфере, которые впоследствии в процессе практической деятельности принимают окончательные формы. При этом для человека, как правило, полному контролю над его мыслями доступна только та сфера жизнедеятельности, которая включена в систему знаний (рис. 3.5):

Рис. 3.5
1) гуманитарные, включающие все дисциплины, которые связаны, прежде всего, с человеком и обществом, в том числе: богословие, философия, законы морали, этика, право (подсистема 1);
2) аналитические (умственные), включающие физические, биологические, естественные и социальные науки (подсистема 2);
3) прикладные, включающие инженерные, в различных областях жизнедеятельности, в том числе технико-технологические, промышленность, сельское хозяйство, транспорт, торговлю (бизнес, финансы и т. п.), образование (обучение, школа, институт) (подсистема 3);
4) психологические и другие, способные осуществлять контроль над состоянием систем и т. п. (подсистема 4).
Совершенно очевидно, что мы получаем знания как инструмент для человека или как систему, подвластную ему и служащую целям его жизнедеятельности, которая распадается на отдельные подсистемы, что обусловливает возможность, а может быть, и необходимость изучать их с системных позиций [21–29], с позиций взаимного влияния и взаимодействия. При этом важно отметить, что прикладные знания (их подсистема) включают в себя биосферные знания. И эта тонкость имеет свое естественное продолжение через биосферу на геосферу к Вселенной.
3.1.2. Единство цели динамических систем иерархии бытияБытие содержит динамические системы и объекты, каждые из которых обязаны своим возникновением и существованием иерархии. При этом бытие обладает иерархическими уровнями, каждый из которых содержит соответствующие динамические системы и объекты, способные выполнять соответствующие целевые назначения. Только в иерархии возможно единство цели бытия, когда системы и объекты взаимосвязаны, взаимозависимы вплоть до взаимоподчинения.
Глобальные цели иерархии бытия включают в себя:
1) формирование структуры иерархии по уровням и целям;
2) формирование структурно-функциональных свойств динамических систем от высшего до низшего уровня;
3) формирование энергетическо-информационных пространств иерархии.
Для реализации глобальной цели иерархия создает среду, например, в виде иерархии динамических систем, для чего производит информацию, производит нужное вещество из материи для активизации функциональных свойств динамических систем различного уровня – от высших до низших.
Для реализации глобальной цели бытие как организация само должно обладать соответствующей структурой зависимых динамических систем.
В общем случае уровни иерархии бытия включают:
1) мегамир, например мегагалактику;
2) мезомир, например галактику (Солнечную систему);
3) макромир, например биосферу, геосферу;
4) микромир.
Каждому из указанных миров соответствуют:
– разные уровни организации структуры;
– объекты разного уровня функционального совершенства, их наполняющие;
– разные уровни энергий вещества, их создавших и ими создаваемых;
– разные уровни информации, ими управляющие: от принципов до законов.
Глобальная цель иерархии разделяется на подцели. Последние реализуются соответствующими подсистемами.
Каким образом сформированы подцели? Одной из возможных генеральных целей иерархии является устойчивое развитие свободных энергий. Такая генеральная цель сформирована для биосферы в работе [18]. Как показывает история развития свободных энергий систем, этот процесс включает смену упорядоченных событий, которая обусловлена функционированием и функциональными процессами систем различного уровня (происхождения) и подуровня (ранга).
Таким образом, среда иерархии формируется как динамическими системами различного уровня, так и выделяемыми ими: вещество, энергию, информацию, за пределы границ своего влияния, что позволяет формировать энергетическо-информационные структуры новым динамическим системам. При этом происходит разделение внешней и внутренней среды посредством границы, через которую осуществляется связь между организациями, вновь созданной и ее создавшей. Так, например, каждая планета Солнечной системы существует как система нижнего уровня, потребляющая вещество и энергию от Солнца, создавая при этом прямую связь между собой и Солнцем. Сюда относится Земля и ее природная среда – биосфера, функционирующая благодаря потокам вещества и энергии, поступающим от систем верхнего уровня иерархии.
Таким образом, в пространстве иерархии создаются:
– потоки F из среды в иерархию систем, создающие аккумуляцию вещества, формирование термодинамического потенциала, информации для организации;
– потоки Д из иерархии в среду, реализующие диссипацию энергии и вещества.
При этом из потока F формируются, например, звезды, последние, имея запасы энергии вещества, выделяют потоки Д в пространство, порождая новые объекты и системы. Если система выделяет потоки Д критического значения, то она исчезает из бытия.
Такие переходы свойственны всем объектам бытия, в том числе человеку и всем системам, им созданным.
Системы и объекты бытия любого уровня иерархии должны, согласно ее замыслам:
1) формировать цель, согласованную с целью иерархии;
2) вырабатывать законы для реализации цели согласно имеющимся у них средствам в виде энергии, вещества и информации;
3) производить в необходимых количествах энергию, вещество и информацию для реализации цели;
4) осуществлять контроль и управление с целью компенсации отклонений энергии, вещества и информации при отклонении от нормы или достижения их критических значений.
Основным исходным положением иерархии бытия, с помощью которого реализуется ее глобальная цель, являются принципы и законы иерархии, ее создающие. Основным принципом иерархии является принцип единства глобальной цели иерархии динамических систем. Отсутствие единства цели создает разноцелевое бытие, внутри которого возможны противостояния, конфликты, взаимоуничтожение, т. е. разрушение иерархии динамических систем.
Принцип единства цели иерархии формируется посредством структуры организации иерархии, которая является базовой в функциональных энергетическо-информационных процессах на различных этапах их формирования (рис. 3.6).

Рис. 3.6
Подсистема 1, формирующая целеполагающие принципы, является основной или идеологической. Здесь закладывают цель и смысл иерархии далеко вперед во времени и энергиях. Эта подсистема формирует необходимые управляющие основы для подсистемы 2, которая является для нее подчиненной.
В подсистеме 2 формируются законы целедостижения, с помощью которых в иерархии реализуются целеполагающие принципы.
В подсистеме 3 формируются законы реализации и осуществляется реализация целеполагающих принципов, с помощью которых создаются динамические системы и объекты различных уровней иерархии.
В подсистеме 4 формируются законы оценки состояний достигнутой цели иерархии, реализуемой посредством энергетическо-информационного потенциала.
Каждая из перечисленных подсистем обладает своей структурой, а в совокупности они обладают структурно-функциональными свойствами.
Возможна дальнейшая детализация подсистем. Так, подсистема 1 (рис. 3.6), в исходной системе формирующая глобальную цель, в свою очередь представляет систему со структурой, изображенной на рис. 3.7. Подсистема 1 системы основополагающих принципов формирует и реализует принцип минимального риска, создавая для этой цели необходимые единые структуры с соответствующими организационными принципами.

Рис. 3.7
Подсистема 2 формирует и реализует принцип структурно-функционального единства систем и объектов иерархии, обеспечивая тем самым их единство цели.
Подсистема 3 формирует и реализует принцип эквивалентных функциональных преобразований при эволюции так, чтобы не нарушались первые два принципа, формируя соответствующие законы, согласно которым создается необходимое вещество (энергия).
Подсистема 4 формирует и реализует принцип обратной или компенсирующей связи, согласно которому при недостатке или избытке функциональных свойств формирует законы их изменения, восполняя (восстанавливая) потребные функциональные свойства.
Таким образом, каждая подсистема структуры иерархии подчинена принципу минимального риска и реализует ту его компоненту, которая функционально свойственна ей.
Гипотеза. Реализация глобальной цели иерархии посредством систем и объектов без структуры невозможна.
Таким образом, совокупность структур иерархии включает следующие:
– основы бытия с подсистемами, функционально осуществляющими организацию, энергию, информацию, массу;
– организации с подсистемами, функционально реализующими целеполагание, целедостижение, целереализацию, контроль над состоянием цели;
– энергетические сферы бытия: физические, химические, биофизические, социальные;
– информационные сферы бытия: духовная, научная, прикладная, оценочная;
– материальные сферы бытия: тонкая, биофизическая, полевая, вещественная.
При этом обеспечивается достижение цели для каждой компоненты бытия и в целом единство конкретной цели иерархии.
Правообладателям!
Данное произведение размещено по согласованию с ООО "ЛитРес" (20% исходного текста). Если размещение книги нарушает чьи-либо права, то сообщите об этом.Читателям!
Оплатили, но не знаете что делать дальше?