Читать книгу "Методы и средства обеспечения безопасности полета"
Автор книги: Владимир Живетин
Жанр: Прочая образовательная литература, Наука и Образование
Возрастные ограничения: 12+
сообщить о неприемлемом содержимом
Развитие методов проектирования с учетом требований экономичности и безопасности полетов получило развитие только в последнее время и еще не достигло должного уровня. В результате иногда наблюдается либо перерезервирование в некоторых системах, т. е. утяжеление и удорожание самолета, либо, наоборот, вводятся конструкционные несовершенства, которые снижают эксплутационные качества самолета. И те, и другие недостатки приходится устранять в процессе испытаний и доводки самолета, что существенно увеличивает цикл его создания и стоимость разработки, т. е. ведет к большим потерям и соответственно увеличивает технический риск.
Управление техническим риском, как правило, осуществляется с целью минимизации его численной величины. Процесс минимизации осуществляется различными способами и в различной степени на всех стадиях жизненного цикла летательного аппарата. Существенно здесь то, что величина потерь характеризуется сочетанием этапа полета, типа или вида внутренних и внешних возмущающих факторов, характерных для ожидаемых условий эксплуатации. Под характерными ожидаемыми условиями эксплуатации подразумевается состояние внешней среды (барометрическое давление, температура наружного воздуха, направление и скорость ветра т. п.) и эксплуатационные факторы (возможные конфигурации самолета, масса и центровка самолета, режим работы двигателя и т. п.). При этом суммарный риск также обусловлен внутренними возмущающими факторами, источниками которых являются пилот, функциональные системы обеспечения полета, их отказы и погрешности [4].
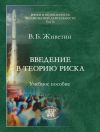
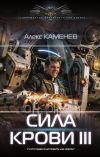
На рис. 1.27 представлено разделение суммарного технического риска Р(z) на две категории: Р(А) – потери, обусловленные появлением опасных режимов пилотирования и связанным с ними выходом из строя (полного или частичного) двигателя самолета, его бортовых систем; Р(В) – экономические потери, обусловленные, например, перерасходом топлива. Каждая из составляющих Р(z)=P(A)+P(B) разбивается на P(A)=Р1i  и P(B)=P2i , согласно количеству этапов полета [том I].
и P(B)=P2i , согласно количеству этапов полета [том I].
Наиболее опасным этапом является посадка. Этот этап мы рассмотрим в плане управления техническим риском. Одним из главных моментов планирования и координации работ по летной годности самолета является выбор тех показателей, которые будут являться критериями обеспечения требуемого качества, свойств и условий летной годности на рассматриваемом этапе проектирования.

Рис. 1.27
При эскизном проектировании в этом процессе можно выделить четыре основных этапа.
1. Распределение заданных (допустимых, расчетных) показателей между функциональными системами и комплексами проектируемого самолета.
2. Распределение показателей между подразделениями-разработчиками функциональных систем с целью более оперативного управления показателями внутри подразделения, ответственного за проектирование нескольких систем.
3. Выполнение экспресс-анализа показателей риска.
4. Определение допустимых вероятностей, в том числе функциональных отказов.
Рассмотрим этап посадки. Отметим что, как правило, на этом этапе потерями топлива пренебрегают. При анализе риска в процессе посадки выявляются возможности реализации опасных условий полета. Этот фактор риска при посадке учитывает возможность приземления за пределы взлетно-посадочной полосы, наличие избыточной вертикальной, боковой или продольной составляющих скорости полета и ситуацию, требующую уход на второй круг после срыва захода на посадку. В нижеследующей таблице приведены значения вероятностей выхода параметров движения за критические значения для самолета ТУ-154М с АБСУ-154-3 (здесь ВПП – взлетно-посадочная полоса).

В колонке «в среднем» даны вероятности событий в предположении, что все случайные параметры замкнутого контура управления изменяются в соответствии со своими законами распределения. В колонке «в предельном случае» даны вероятности событий, когда один из случайных параметров находится на своем предельно допустимом значении, а все остальные изменяются в соответствии со своими законами распределения.
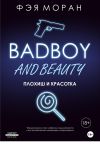
На рис. 1.28 приводится детализация составляющих суммарной вероятности катастрофы, обусловленной наличием систем (посадка в автоматическом режиме) при посадке. При этом роль отказов бортового оборудования (внутренние возмущающие факторы) чрезвычайно велика и сравнима со всеми остальными возмущающими факторами, вызывающими реализацию опасных траекторий движения с выходом в критическую область.

Рис. 1.28
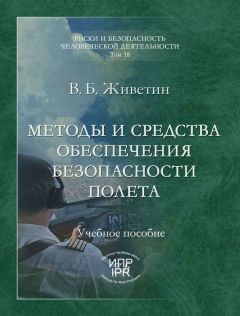
На рис. 1.29 представлены составляющие суммарного риска при заходе на посадку самолета по категории II. На этом этапе полета отказы систем играют важную роль, и потому их выделяют отдельной величиной, которая при проектировании должна быть заданной для всех подсистем обеспечения захода и выполнения посадки.

Рис. 1.29
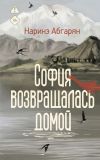
1.7.3. Производственно-технологический этап. Погрешности производстваКак правило, траектория полета, соответствующая, например, максимальной дальности полета L, характеризуется совокупностью параметров, расчетные значения которых обозначим у5=уопт=(у51, у52, …, у5m) (рис. 1.30). Например, у51=Н – расчетная (оптимальная) высота полета; у52=M – расчетное (оптимальное) число Маха; у53=G – вес самолета; у54=хт – положение центра тяжести; у55=K – числовое значение качества (K=Су/Сх); Су, Сх – коэффициенты подъемной силы и сопротивления. При этом L=f(уопт)=f(у5).
В процессе полета задача состоит в обеспечении равенства у4=у5, где у4=(у41, у42, …, у4m), у4i – параметры траектории, измеренные с помощью бортового оборудования. Будем рассматривать также вектор у3=уф=(у1ф, …, уmф) фактических значений параметров траектории в данном полете в каждый из моментов времени t.

Рис. 1.30
На рис. 1.30 обозначения: ИИС – информационно-измерительная система, САК – система автоматического контроля.
Таким образом, выделены векторы (см. рис. 1.30):
 – оптимальные параметры (при отсутствии погрешностей расчета);
– оптимальные параметры (при отсутствии погрешностей расчета);
у=урас – расчетные оптимальные параметры траектории, полученные на этапе проектирования научно-исследовательских и опытно-конструкторских работ;
у1=уп – параметры, реализованные с учетом погрешностей производства планера и двигателя (сх, су, …);
у2 – параметры, реализованные с учетом предполетной подготовки;
у3=уф – фактические параметры траектории, реализованные в данном полете;
у4=уизм – измеренные в полете параметры траектории;
у5=уопт – оптимальные параметры траектории, полученные с помощью системы оптимизации режима полета (СОРП) в данный момент времени.
Согласно приведенной схеме, общая (суммарная) погрешность включает в себя следующие погрешности:
Δy0=(y – ) – методов расчета;
Δу1=(у1 – у) – вносимые при производстве планера и двигателя;
Δу2=(у2 – у1) – предполетной подготовки;
Δу3=(у3 – у2) – обусловленные влиянием внешних возмущающих воздействий;
Δу4=(у4 – у3) – вносимые системами измерения и контроля;
Δу5=(у5 – у4) – связанные с несовершенством СОРП.
Таким образом, суммарная погрешность выдерживания (обеспечения) оптимальной дальности составляет  .
.
В полете с помощью систем ручного или автоматического управления вектор погрешностей Δу стремятся свести к нулю. Запишем вектор Δу иначе:
Δу=Δупп+Δубо+Δувв+Δум+Δуорт+Δуэ,
где Δупп – погрешности по причине несовершенства производства планера и двигателя летательного аппарата; Δубо – погрешности измерения параметров траектории (погрешности бортового оборудования); Δувв – отклонения у, обусловленные внешними возмущениями; Δум – методическая погрешность выдерживания у из-за неточностей расчетных методов; Δуэ – погрешности, обусловленные эксплуатационными факторами, в том числе их неблагоприятным сочетанием; Δуорт – погрешности, связанные с несовершенством СОРП.
При этих условиях необходимо разработать методику расчета численных величин показателей технического риска (инвестиционного риска), включающую построение моделей функционирования подсистем (1–7) (рис. 1.30), являющихся источниками отдельных компонент вектора погрешностей Δу=(Δу1, …, Δу5) [18].
Способы решения задачи различны в случаях, если исследуемый ЛА находится на стадии проектирования или на стадии эксплуатации. В случае, когда ЛА находится в эксплуатации, есть возможность получить статистический материал о случайном процессе Δу, например, в виде плотности вероятностей W(Δу, t). Однако при таком подходе невозможно вскрыть влияние отдельных подсистем (1–7) (рис. 1.30) на величину Δу, т. е. оценить влияние производства, систем контроля, системы управления (в том числе пилота), следовательно, и их влияние на величину технического риска.
На этапе проектирования необходимо установить зависимость или построить математические модели между входами и выходами каждой из подсистем (1–7), а также модели погрешностей, порожденных каждой из этих подсистем. Полностью описать процессы от подсистемы (1) до подсистемы (7) достижения конечной цели полета – максимальной дальности – затруднительно, поэтому в некоторых моделях необходимо использовать результаты экспериментальных исследований для введения эмпирических соотношений в математические модели. Такой метод расчета численных величин показателей технического риска не позволяет получить окончательные результаты чисто теоретическим путем. Однако предлагаемый ниже метод дает возможность выделить задачи, которые решаются чисто расчетным или чисто экспериментальным путем, тем самым обеспечивая целенаправленное проведение экспериментальных исследований, а также уменьшение их объема.
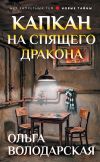
Блок-схема совокупности систем, оказывающих влияние на потери инвестора, представлена на рис. 1.31 (СУ – система управления). Здесь рассматривается полет на максимальную дальность Lmax. Основная система автоматического контроля – САК-1, задачей которой является измерение фактических значений параметров траектории движения хф в полете. С одной стороны, погрешности δ1 измерения хф приводят к существенным потерям, например, расхода топлива, с другой – система автоматического контроля САК-2 регламентирует погрешности δ2 изготовления: обводов аэродинамических поверхностей конструкции ЛА, деталей двигателя и других систем самолета. В результате расчетная дальность полета Lp=f1(R*x, x, …), где расчетная величина сопротивления R*x определена без учета погрешностей δ1, δ2.

Рис. 1.31
Для фактической дальности полета имеем Lф=f3( , xiизм, …)
, xiизм, …)  , где фактическая величина сопротивления представляет собой функцию вида =f4(xiф(δ1), δ2, …); δ1=f5((δxi)o, (δxi)ин, (δxi)м, …); δ2=f6(Δψ, …); (δxi)o – начальная погрешность измерения; (δxi)ин – инструментальная погрешность измерения; (δxi)м – методическая погрешность измерения; Δψ – погрешности производства.
, где фактическая величина сопротивления представляет собой функцию вида =f4(xiф(δ1), δ2, …); δ1=f5((δxi)o, (δxi)ин, (δxi)м, …); δ2=f6(Δψ, …); (δxi)o – начальная погрешность измерения; (δxi)ин – инструментальная погрешность измерения; (δxi)м – методическая погрешность измерения; Δψ – погрешности производства.
Таким образом, согласно физической сути процессов, погрешности δ1 и δ2 функционирования САК-1 и САК-2 приводят к одной и той же итоговой погрешности, а именно к уменьшению оптимальной (максимальной) дальности на величину ΔL=Lф – Lp=f7(δ1, δ2, …). Уменьшая погрешности δ1, δ2 до нуля, можно достичь теоретически ΔL  0. Однако практически это невозможно по техническим и экономическим причинам.
0. Однако практически это невозможно по техническим и экономическим причинам.
В рассматриваемой ситуации для решения проблемы формирования замкнутого контура необходимо определить соотношения между δ1 и δ2, т. е., по существу, определить что первично, и что нужно уменьшать, чтобы при малых затратах на производство планера и двигателя, с одной стороны, и бортового оборудования – с другой, достичь Lp с погрешностью в заданных пределах.
Для решения этой проблемы нужен показатель, характеризуемый численной величиной, с помощью которого учитывается роль каждой из погрешностей δ1, δ2. В качестве такого показателя выберем вероятности Р1(А1), Р2(А2), Р3(А3), приведенные выше, которые в рассматриваемом случае запишем в виде

где Lизм=Lф+δ1Lизм, Lф=М{Lф}+ΔL(δ1, δ2).
Используя (1.43), можно показать, что, уменьшая погрешности δ2 производства аэродинамических поверхностей и увеличивая погрешности функционирования информационно-измерительных систем параметров траектории движения δ1, или наоборот, можно обеспечить условие Рi=const. Отметим, что увеличение погрешностей δ2 производства ЛА снижает его стоимость, а уменьшение δ1 повышает стоимость информационно-измерительной системы.
Таким образом, введен показатель, представляющий возможность обоснованно назначать допустимые величины погрешностей производства геометрических размеров ЛА, а в необходимых случаях перераспределять погрешности δ1 и δ2, обеспечивая заданные значения Рi (i=1,2,3), а в итоге показатели риска, в том числе финансовые потери.
При разработке математических моделей, при вычислении Pi(Ai), как правило, рассматривают следующие задачи.
1. Выбор и обоснование математической модели для данных условий.
2. Получение коэффициентов выбранной модели.
В зависимости от свойств среды, геометрии самолета, конкретных условий движения, а также от свойств и точности информации, получаемых на выходе таких моделей, они описываются с различной степенью детализации, как правило, с помощью дифференциальных уравнений, в том числе и в частных производных.
В некоторых ситуациях процесс создания моделей представляет собой многоэтапную процедуру. Так, модели самолета, двигателя и его систем, создаваемых с учетом летчика в контуре управления самолетом, оцениваются путем автоматизированного прогона их на ЭВМ с целью получения набора характеристик (времени разгона и торможения самолета, статической и динамической устойчивости и управляемости и т. п.) [37, 38]. В дальнейшем эти вычисленные характеристики сравниваются с эталонными, полученными путем обработки результатов летных испытаний. Ключевой в этих исследованиях является цифровая модель действий летчика при управлении самолетом [14, 30].
Рассмотрим модель для оценки экономического риска на структурно-функциональном уровне, которую можно представить обобщенно в следующем виде (рис. 1.32).

Рис. 1.32
Ясно, что с целью снижения экономических потерь на этапе эксплуатации ЛА необходимо выбрать такие модели на этапе НИР и ОКР, которые обладают минимальными ошибками. Возникает противоречие между требуемой точностью модели и затратами на ее создание, разрешить которое можно, используя показатели технико-экономического риска, включающие затраты на проведение НИР и ОКР, которые повышаются при использовании высокоточных моделей. При этом доходы от эксплуатации также повышаются в связи с повышением точности полученных результатов по выбору параметров как самой системы, так и параметров траектории движения.
Так, в рамках решаемой задачи обеспечения оптимальной дальности полета необходимо учитывать все этапы и соответствующие режимы полета, т. е. рассматривать системный принцип проектирования, производства и эксплуатации (системная авиация).
1.8. Технико-экономические потери на этапе эксплуатации
Анализ причин возникновения и способов нейтрализации риска в процессе эксплуатации ЛА позволяет сформулировать следующее:
– уровень риска в полете на современном ЛА определяется уровнем свойств и состоянием всего авиационного комплекса, включая: ЛА, экипаж, бортовые системы управления ЛА и обеспечение жизнедеятельности, наземные средства руководства полетом;
– необходимый уровень риска обеспечивается высоким уровнем знаний характеристик ЛА и условий полета, в том числе состояния среды, в которой протекает полет;
– при рассмотрении проблем моделирования риска необходимо учитывать характер многих закономерностей, имеющих место в процессе функционирования авиационного комплекса;
– ведущая роль в благоприятном завершении полета принадлежит системе «ЛА – экипаж».
Эксплуатационный риск – векторная величина, т. е. многомерная характеристика, каждая компонента которой оценивается разными службами, людьми (организующими полет или участвующими в нем) различным образом. При этом эксплуатационный риск включает в себя следующие виды рисков:
– производственные, связанные с исполнением конструкции ЛА, двигателя и бортового оборудования;
– технические, связанные с бортовым оборудованием, которое обеспечивает предотвращение выхода из области допустимых состояний;
– финансовые, обусловленные превышением фактических эксплуатационных расходов над расчетными или оптимальными, в том числе из-за расхода топлива;
– обусловленные наличием недостоверных характеристик ЛА и рекомендаций по управлению им;
– обусловленные наличием недостоверных характеристик возмущающих факторов, в том числе в среде, в которой протекает полет.
Каждая из указанных компонент риска может быть разбита еще на ряд составляющих. Разбиение зависит от поставленной задачи, степени детализации конечных результатов по оценке влияния отдельных систем ЛА на величину риска.
Важной составляющей риска является уровень знаний характеристик ЛА, его систем бортового оборудования, систем наземного комплекса, с помощью которых осуществляются взлет, посадка, полет по эшелонам. Отказы авиационной техники, ошибки летного состава, непредусмотренные расчетами воздействия среды на ЛА, чаще всего обусловлены влиянием множества случайных факторов, неполный учет которых приводит к случайным непредвиденным исходам в полете.
При решении различных практических задач, принятии различных управленческих (проектных) решений можно учитывать все новые и новые группы факторов: от самых существенных до самых ничтожных, тем самым пытаясь уменьшить роль (предотвратить появление) случайного (ничтожного, неосознанного) фактора. Однако полностью исключить влияние таких факторов невозможно, так как человеческие знания относительны, и каждому уровню познаний соответствуют свои погрешности. Кроме того, часто глубина наших исследований ограничивается финансовыми возможностями.
Подводя итог сказанному, сформулируем следующее определение: технический риск есть интегральная характеристика потерь, реализованных за весь жизненный цикл самолета или самолетов данного класса.
Потери топлива и техники в процессе эксплуатации ЛА являются основными потерями для современных ЛА, о чем свидетельствует анализ материалов их эксплуатации. Для компенсации (минимизации) этих потерь на новейших самолетах, например на авиалайнерах, устанавливаются:
– для экономичного расхода топлива – системы оптимизации режимов пилотирования (СОРП);
– для уменьшения потерь материальных и социальных (человеческих жертв) – система предупреждения критических режимов (СПКР).
Система оптимизации режимов пилотирования позволяет вычислить при заданных свойствах планера и двигателя, конфигурации самолета оптимальные параметры траектории полета, при которых достигается максимальная (оптимальная) дальность полета L или минимальный расход топлива  . В случае, когда параметры траектории полета отличаются от оптимальных, например, при отсутствии системы оптимизации режимов пилотирования, и топливо расходуется неоптимально, происходят потери, что обусловливает соответствующий риск [47]. В реальных условиях на ЛА могут быть установлены:
. В случае, когда параметры траектории полета отличаются от оптимальных, например, при отсутствии системы оптимизации режимов пилотирования, и топливо расходуется неоптимально, происходят потери, что обусловливает соответствующий риск [47]. В реальных условиях на ЛА могут быть установлены:
– только система оптимизации режимов пилотирования;
– только система предупреждения критических режимов;
– одновременно обе системы.
Рассмотрим, как в процессе проектирования самолета, имеющего СОРП, формируется показатель риска, связанный с достижением или недостижением максимальной дальности полета. Заданное по техническому заданию значение дальности полета (L) – это то ее значение, которое имеет место быть, когда математические модели, методы расчетов и проектирования не имеют погрешностей. Обозначим эту величину Lкр – критической, равной максимальному значению дальности полета ЛА.
При проектировании мы получаем расчетную величину дальности полета Lр. Если бы методы расчета и математические модели не обладали погрешностями, то Lр=Lкр. В реальности за счет погрешностей расчета δLр имеем Lр=Lкр+δLр, т. е. Lр ≠ Lкр. Равенство имеет место, когда M{δLр}=0, где M{δLр} – математическое ожидание случайной величины δLр. При этом имеем M{Lр}=Lкр.
При проектировании с целью обеспечения заданной (максимальной) дальности полета выбираются необходимые параметры самолета (обозначим их через А). За счет ошибок δLр мы можем выбрать параметр ЛА с ошибками δА. Прогнозирование и оценка такой ситуации важны для инвестора, так как расходы на работы в этом случае могут не окупиться. Они могут возрасти после проведения опытно-конструкторских работ, когда этот факт обнаружится.
Погрешность расчетов δLр представим в виде: δLр=δL1+δL2, где δL1 – погрешность, обусловленная расчетами аэродинамических сил Rx, Ry, Rz и другими факторами, влияющими на Rx, Ry, Rz; δL2 – погрешности, обусловленные несовершенством алгоритмов оптимизации, построенных на этапе научно-исследовательских работ, включающих погрешности контроля, стабилизации и управления. Отметим, что погрешности существующих методов расчета аэродинамических характеристик достигают 10 %.
На этапе опытно-конструкторских работ уточняется Lкр=Lmax, и после экспериментального полета получают величину, равную  . При этом =Lp+δL0, где δL0 – погрешность дальности полета, обусловленная влиянием погрешностей опытных образцов бортового оборудования, двигателя, конструкции самолета.
. При этом =Lp+δL0, где δL0 – погрешность дальности полета, обусловленная влиянием погрешностей опытных образцов бортового оборудования, двигателя, конструкции самолета.
В процессе производства каждая из подсистем: планер, двигатель, бортовое оборудование изготавливаются с погрешностью δn, и в результате для идеальных условий эксплуатации получаем Lп, которая включает в себя погрешность δLп, и тогда Lп=Lр+δLп.
При эксплуатации ЛА за счет влияния внешних δВ1 и внутренних δВ2 возмущающих факторов получаем эксплуатационную или фактическую дальность полета вида Lф=Lп+δLэ(δВ1, δВ2). Погрешности δLр, δLп, δLэ являются случайными, каждая из них характеризуется своей плотностью вероятности. При этом фактическое значение Lф совпадает со значением, полученным при эксплуатации.
При таких условиях технический риск, имеющий место при проведении опытно-конструкторских работ, будет связан с теми ситуациями, которые возникают в процессе их выполнения, а именно:
А1=(Lф < Lкр, Lр ≥ Lдоп), А2=(Lф ≥ Lкр, Lр < Lдоп),
А3=(Lф < Lкр, Lр ≤ Lдоп), А4=(Lф ≥ Lкр, Lр > Lдоп).
В результате искомые вероятности будут включать Р1=Р(А1); Р2=Р(А2); Р3=Р(А3), Р4=Р(А4). Вероятность Р2 соответствует тому, что мы отвергли экономически выгодную конструкцию (объект); Р1 – приняли к исполнению вариант ЛА, который не подтверждает возможность достижения поставленной цели; Р3 – получили отрицательный результат, что обусловило потери, связанные в данном случае с расходами проведения опытно-конструкторских работ; Р4 – принято правильное решение.
Пусть ставятся следующие задачи: обеспечение одновременно оптимизации режимов пилотирования с целью снижения потерь расхода топлива, а также предупреждение критических режимов пилотирования с целью минимизации потерь техники и расходов на ремонт ее в послеаварийный период.
Пусть контролю и ограничению подлежат n параметров х1, х2, …, хn траектории полета самолета и состояния внутренних систем. В этом случае с помощью системы предупреждения критических режимов мы планируем осуществить предупреждение режимов полета, при которых параметры хi принимают критические значения.
При этом финансовые (материальные) потери, обусловленные возникновением событий Bi=(xi > xiкр), где xiкр – критическое значение параметра xi, обозначим через αip. В процессе проектирования мы можем оценить стоимость Цi и массу mi такой системы. Управление расходом топлива будем осуществлять с помощью системы оптимизации режимов пилотирования. Суммарная стоимость (ЦΣ) СПКР, СОРП и их масса (mΣ) зависят от объема обрабатываемой информации, в том числе от количества контролируемых, ограничиваемых и управляемых параметров xj.
Итак, задача состоит в оптимизации ψ=(α*, , ЦΣ, mΣ). Трудность решения такой задачи заключается в том, что для минимизации (α*, ) необходимо контролировать все параметры хi траектории полета, в том числе возмущающие факторы, например ветер. С другой стороны, для минимизации (ЦΣ, mΣ) требуется ограничивать количество параметров хi . Это противоречие сегодня решается конструкторами ЛА, СПКР, СОРП путем анализа потребностей рынка и возможностей производственно-технологической базы авиастроения. Возможно, такой подход оправдан. Однако необходимо иметь аналитические методы, позволяющие проводить анализ технического риска.
Согласно приведенной схеме процесса создания и эксплуатации пассажирского самолета, необходимо обеспечить заданную величину прибыли Z5=Z (рис. 1.11). В качестве критической величины прибыли выступает Zкр=0, т. е. когда прибыль равна нулю. В рамках рассматриваемой задачи прибыль Z зависит от расхода топлива () и потерь техники (α) в процессе эксплуатации самолета:
Z=f(, α).
Часто последнюю зависимость можно представить в более простом виде:
Z=k1φ1()+k2φ2(α),
где f, φ1, φ2 – непрерывные функции своих аргументов.
Если отклонение фактического расхода от оптимального  мало, то возможно дальнейшее упрощение зависимости:
мало, то возможно дальнейшее упрощение зависимости:
Z=k3Δ+k4Δα,
где Δ= – ; Δα=α – αopt.
Отметим, что частота Pi выхода параметров траектории xi в критическую область позволяет вычислить αi=PiЦi, где Цi – стоимость работ по восстановлению техники, обусловленных выходом параметра xi в критическую область.
В процессе эксплуатации самолета, оборудованного СОРП и СПКР, возможны следующие события [18]:

где

При этом  есть критическое значение расхода топлива, начиная с которого полет совершается без прибыли, бизнес несет финансовые потери, прибыль Z или равна нулю, или отрицательная;
есть критическое значение расхода топлива, начиная с которого полет совершается без прибыли, бизнес несет финансовые потери, прибыль Z или равна нулю, или отрицательная;  – допустимая величина расхода, отличающаяся от на некоторый запас, обусловленный влиянием погрешностей бортовых измерительных систем и систем оптимизации.
– допустимая величина расхода, отличающаяся от на некоторый запас, обусловленный влиянием погрешностей бортовых измерительных систем и систем оптимизации.
Введем событие A1(Z), которое происходит тогда, когда выполняются одновременно два события А1=(АX,  ). Обозначим через Р1 вероятность такого события, и тогда
). Обозначим через Р1 вероятность такого события, и тогда
P1=P(AX, )=P(AX)+P()
в силу независимости АX и из соотношения (1.44).
Вероятность Р1(А1) является характеристикой безопасного состояния в полете по функционально-экономическому параметру. На практике возможны различные сочетания событий из соотношений (1.44) вида

Для части Аi  характерно событие Z < Zкр, где прибыль Z в соответствующем режиме полета будет критической. Другие Аi включают события, при которых мы отказались от выгодного (оптимального) режима. Каждому событию Аi соответствует своя вероятность Pi=P(Ai). В силу независимости Ai между собой вероятность суммы всех событий Ai имеет вид
характерно событие Z < Zкр, где прибыль Z в соответствующем режиме полета будет критической. Другие Аi включают события, при которых мы отказались от выгодного (оптимального) режима. Каждому событию Аi соответствует своя вероятность Pi=P(Ai). В силу независимости Ai между собой вероятность суммы всех событий Ai имеет вид

Задача проектировщика состоит в том, чтобы подобрать такой комплекс: ЛА, двигатель, СПКР, СОРП, для которого вероятность Р1 достигала бы максимума, а вероятность  – минимума.
– минимума.
При расчете потерь прибыли следует включить стоимость по величине расхода q; стоимость восстановительных работ, обусловленных разрушениями при аварии самолета; стоимость работ по созданию самолета, СПКР, СОРП, двигателя; прибыль, полученную в процессе эксплуатации самолета. При этих условиях вероятность РΣ(А) представляет собой вероятность невыполнения поставленной цели, т. е. технический риск. С целью анализа, прогнозирования и управления риском необходимы математические модели, позволяющие установить явные зависимости между Pi(Ai) и параметрами контроля и управления на различных этапах жизненного цикла ЛА.