Текст книги "Введение в анализ риска"
Автор книги: Владимир Живетин
Жанр: Прочая образовательная литература, Наука и Образование
Возрастные ограничения: +12
сообщить о неприемлемом содержимом
Текущая страница: 5 (всего у книги 17 страниц) [доступный отрывок для чтения: 6 страниц]
1.6. Финансовый риск. Посреднический риск
В упрощенном виде задачей любой экономической системы является инвестирование денежных средств в быстро растущие, эффективно развивающиеся и высокоприбыльные отрасли хозяйства. Предпринимателю для расширения производства и увеличения прибыли нужны финансовые ресурсы, они нужны и государству для выполнения своих экономических функций. Однако, как показывает практика, эта потребность растет значительно быстрее финансовых возможностей и предпринимателей, и государства – прибыль, с одной стороны, и доходы для государства (преимущественно налоги) – с другой – оказываются недостаточными для обеспечения всех необходимых расходов. Так образуются дефициты бюджетов государства и финансовых предприятий.
На другом «полюсе» экономики находится население, которое постепенно расходует свои текущие доходы, постоянно имея текущий достаток временно свободных средств. Эти средства накапливаются для покупки товаров длительного пользования, для создания страхового фонда на случай старости или болезни. На эти средства как на источник финансирования своей деятельности предъявляют растущий спрос и государство, и предприятия [53].
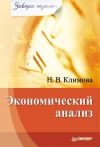
Спрос и предложение свободных денежных ресурсов населения порождает финансовый рынок, на котором происходит движение денежных ресурсов от их владельцев к тем, кто их будет использовать. Движение денежных средств в рамках финансового рынка показано на рис. 1.7.
Для государства и предприятий существует несколько путей «покупки» денежных средств населения на финансовом рынке. Первый путь – взять деньги в кредит, второй – продать часть своего имущества или право на совладение этим имуществом. Первый путь находит выражение в выпусках государственного и частных долговых обязательств, в частности, облигаций. Второй связан с выпуском акций. Таким образом, на самом финансовом рынке происходит выделение двух тесно связанных между собой, но, тем не менее, отличающихся сегментов: рынка титулов собственности и рынка долговых документов и расписок.

Рис. 1.7
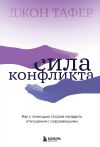
В свою очередь, движение бумажных свидетельств о совершении той или иной финансовой сделки – продажи акций или предоставления займа – образует рынок ценных бумаг. Основу последнего составляет биржа – особый экономический институт, организующий оборот ценных бумаг, ранее проданных владельцам или инвесторам. Биржа олицетворяет собой вторичный рынок, на котором в ходе постоянных купле – продаж ценных бумаг происходит перераспределение капиталов в масштабах хозяйства; растет ликвидность самих бумажных обязательств, так как в ходе постоянно организованной торговли каждый владелец ценной бумаги имеет гарантию, что его бумаги могут быть проданы в любую минуту по его желанию или заменены новыми бумагами; создаются условия для дополнительных выпусков новых ценных бумаг уже существующих акционерных обществ или корпораций, а также вновь образуемых предприятий, все это происходит в рамках так называемого первичного рынка и обычно определяется как первичное размещение ценных бумаг (см. рис. 1.8).

Рис. 1.8
Выпустить ценные бумаги и реализовать их – это две стороны функционирования современных финансовых рынков. Самая сложная проблема – найти покупателя, так как не каждый владелец сбережений готов купить ценные бумаги. Это объясняется и размером его сбережений, и его неуверенностью в выгоде такой покупки. Ценные бумаги могут упасть в цене: доход, выплачиваемый по ним, может оказаться ниже темпов инфляции, фирма, выпустившая эти ценные бумаги, может разориться. При этом существует риск возможных убытков финансовых средств.
Владелец свободных денежных ресурсов, сбережений и потенциальный инвестор, готовый приобрести ту или иную ценную бумагу, не знает, каким будет будущий реальный доход от его капиталовложений, как этот доход будет отличаться от того дохода, на который инвестор рассчитывает, совершая покупку финансовых активов, т. е. различного рода финансовых свидетельств, титулов собственности и долговых обязательств. К финансовым активам относятся также наличные деньги, вклады в банках и других кредитных учреждениях.
Финансовые активы, взятые в совокупности с материальными активами (земля, недвижимость, запасы товаров длительного и кратковременного пользования), образуют совокупное богатство страны. Каждый элемент совокупного богатства, имеющийся в распоряжении инвестора в данный момент времени, характеризуется своим специфическим доходом. Доходы по материальным и финансовым активам, измеренные за длительный период времени, составляют основу для решения инвестора об инвестировании проекта. Знания таких исторических тенденций в уровнях доходов по различным активам формируют и ожидания инвесторов в отношении будущих доходов от их инвестиций. При этом инвестор ориентируется на наиболее вероятный ожидаемый доход. Разница между доходом R0, ожидаемым инвесторами от их инвестиций, и фактическим, или реальным доходом Rф, который им предстоит получить, определяется как риск. Какова величина риска и как его изменить, сказать в настоящее время трудно. Это обусловлено отсутствием численных показателей риска, характеризующих неопределенности будущих доходов или потерь относительно современных инвестиций. По этой причине значительная часть населения, не склонная к риску, не пустит свои денежные ресурсы в экономический оборот. Частично решить проблему неопределенности в отношении инвестиционного риска и будущих доходов позволяют оценки величины риска.
Наиболее простым способом оценки величины риска по тому или иному виду активов является вычисление отдельного отклонения от их средней величины. При этом среднеквадратическое отклонение определяет то, что инвестор может заработать от своих инвестиций в наиболее благоприятных условиях рынка, против того, что он может потерять в наихудших рыночных условиях. Каждому виду финансовых и материальных активов присущ свой риск, свое стандартное среднеквадратическое отклонение.
При сопоставлении оцениваемой величины инвестиционного риска и уровня дохода по инвестициям обнаруживается важная закономерность: при повышении уровня ожидаемого дохода возрастает величина риска. Значит, чем больший доход инвестор стремится получить, тем на больший риск он должен пойти.
Разнообразные посредники, взаимодействующие на финансовом рынке с хозяйственными субъектами, а также между собой, играют важную роль в перемещении средств. Они аккумулируют небольшие, часто краткосрочные сбережения многочисленных мелких владельцев, в том числе домашних хозяйств, и представляют большие суммы и на долгое время тем, кому эти средства необходимы.
Многие из посредников имеют уникальные черты, но всем им присуще одно общее свойство. Они выпускают собственные обязательства, т. е. одалживают деньги у субъектов с достатком средств. В этом смысле ни брокеры, ни дилеры, ни даже биржи финансовыми посредниками не являются.
Функции финансовых посредников в наиболее широком плане могут быть разделены на две основные группы.
I. Эффективное распределение имеющихся в обществе денежных ресурсов, заключающееся главным образом в их перемещении из сфер «традиционного» или малоэффективного использования в новые, более эффективные сферы хозяйства посредством:
– учета различий в склонностях владельцев сбережений, создания системы так называемых «вторичных обязательств», т. е. промежуточных обязательств самих кредитных учреждений перед своими вкладчиками, вовлечения в оборот новых денежных ресурсов;
– преодоления неопределенности и незнания инвесторов относительно начала эффективного вложения своих средств, в том числе предоставления им информации и финансовых консультаций;
– управления рисками, присущими различным видам финансовых активов, находящихся в совокупных портфелях кредитных учреждений;
– страхования непредвиденных рисков и перераспределения рисков от одних экономических агентов к другим;
– экономии на масштабах операций и их специализаций;
II. Стимулирование предпринимательской деятельности и деловой активности, а также покупательного спроса на основе:
– обеспечения экономики кредитными платежными средствами и развития системы безналичных расчетов;
– участия в создании новых предприятий и в управлении ими.
Выполнение этих функций определяет экономическую роль финансовых посредников в экономике современного развития стран мира.
Финансовые посредники обычно подразделяются на три финансовые группы: депозитные; контрактно-сберегательные; инвестиционные. Мы ограничимся рассмотрением финансовых институтов депозитного типа.
Общей чертой посредников данного типа является то, что они привлекают средства путем открытия типовых и сберегательных, в том числе срочных, счетов и используют их для предоставления различных займов, приобретения кредитных закладных и ценных бумаг правительства и корпораций.
Коммерческие банки являются наиболее мощными организациями депозитного типа. Пассивы коммерческих банков состоят главным образом из текущих вкладов и сберегательных счетов. Активы примерно равномерно распределены между:
– назначенными обязательствами;
– муниципальными облигациями;
– займами бизнесу;
– кредитами потребителям;
– залоговыми кредитами;
– наличностью;
– резервами.
В соответствии с высокой подвижностью пассивов, активы коммерческих банков обладают высокой ликвидностью.
Сберегательно-кредитные ассоциации – это специализированные финансовые организации. Они привлекают средства путем открытия сберегательных счетов и используют их для предоставления целевых залоговых кредитов. Аналогичным образом функционируют так называемые взаимные сберегательные банки. Но в отличие от ассоциаций они предназначены для местных вкладчиков.
Существуют также кредитные союзы и взаимные денежные фонды. Эти организации, как правило, маломощные.
Глава 2. Показатели эксплуатационного риска
2.1. Области возможных состояний технической системы
Состояние любой технической системы описывается некоторой совокупностью параметров {αk},  , часть из которых подлежит контролю и ограничению в процессе ее функционирования. Эту часть параметров обозначим в виде вектора X = (x1, x2, …, xn) с компонентами xi,
, часть из которых подлежит контролю и ограничению в процессе ее функционирования. Эту часть параметров обозначим в виде вектора X = (x1, x2, …, xn) с компонентами xi,  .
.
При эксплуатации технических систем, например самолетов, величины параметров xi ограничиваются их критическими значениями – такими значениями, выход за которые недопустим ни при каких обстоятельствах, поскольку связан с аварией или катастрофой (человеческими жертвами). В одномерном случае множество всех критических значений содержит два элемента – верхнее и нижнее критические значения рассматриваемого параметра.
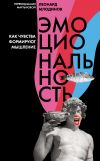
Так, критическими значениями параметров ЛА являются такие их значения, при достижении которых происходит потеря устойчивости, управляемости, маневренности, прочности конструкции самолета, пересечение траектории полета с рельефом местности, в результате чего самолет не может выполнить поставленную задачу. Все те значения xi, при которых самолет устойчив, управляем, не разрушается, не пересекает рельеф местности, назовем допустимыми. Эти значения образуют некоторое множество, которое обозначим (Ωi)доп. Пусть его граничные элементы – xнi кр, xвi кр, xнi кр < xвi кр (см. рис. 2.1). Дополнение к множеству (Ωi)доп содержит значения xi, которые назовем недопустимыми, а само множество обозначим через (Ωi)н доп. Как правило, элементы множества (Ωi)доп определяются для идеальных условий эксплуатации самолета. На практике возникают неблагоприятные сочетания эксплуатационных факторов, влияние которых невозможно оценить.

Рис. 2.1. Области возможных состояний динамической системы
Введем эксплуатационные значения (хi)э параметра хi, т. е. такие его значения, которые допустимы в процессе эксплуатации самолета. Они образуют множество (Ωi)э  (Ωi)доп. При этом мы уменьшаем область изменения параметров эксплуатации самолета за счет неопределенности как самой этой технической системы, так и состояния среды, в которой она функционирует.
(Ωi)доп. При этом мы уменьшаем область изменения параметров эксплуатации самолета за счет неопределенности как самой этой технической системы, так и состояния среды, в которой она функционирует.
Граничные элементы множества (Ωi)э обозначим (хнi)доп и (xвi)доп, (xнi)доп < (xвi)доп. При этом имеем
xнi доп = xнi кр + δнi; xвi доп = xвi кр – δвi,
где χнi кр, χвi кр – соответственно нижнее (минимальное) и верхнее (максимальное) критические значения/-го параметра; хнi кр, хвi кр – соответственно нижнее (минимальное) и верхнее (максимальное) допустимые значения /-го параметра; δнi, δвi – соответственно нижняя и верхняя величины гарантийного запаса для i-го параметра, вводимые на случай непреднамеренного выхода хi за допустимые значения при неблагоприятном сочетании эксплуатационных факторов. При этом критические значения, как правило, определяются для установившегося или квазиустановившегося режима полета (когда компоненты вектора состояния X постоянны или изменяются пренебрежимо мало) и представляются в виде функций, зависящих от аэродинамических и других характеристик самолета, определяемых по результатам эксперимента.
С целью контроля и ограничения параметров движения используются системы контроля и системы управления. В дальнейшем под контролем будем понимать установление соответствия между описываемым с помощью вектора X состоянием объекта контроля (контролируемых параметров) и допустимыми их значениями.
В процессе функционирования динамической системы для определения xi(t), т. е. текущих значений параметров, используется информационно-измерительная система, которая обладает погрешностями δi(t). В результате ее применения на выходе имеем (xi)изм = xi + δi. Погрешности измерения δi(t) обусловливают необходимость введения допустимых по прибору значений контролируемого и ограничиваемого параметра движения xi (t), т. е. дополнительного запаса.
Введем множество (Ωi)прдоп допустимых по прибору значений xi(t) следующим образом:
(Ωi)прдоп = {xi : (xiн)прдоп < xi < (xiв)прдоп}, ,
где (xiн)прдоп, (xiв)прдоп – соответственно нижнее и верхнее допустимые по прибору значения xi(t) (см. рис. 2.1). В частном случае (xiв)прдоп =(xiв)доп – Qiв; (xiн)прдоп = (xiн)доп + Qiн, где Qiв, Qiн – соответственно верхний и нижний запасы, обусловленные погрешностями измерения и подлежащие определению в процессе проектирования ЛА и его бортовых систем.
В общем случае информационно-измерительная система включает фильтры различной структуры, например фильтр Калмана [62]. При этом на выходе системы имеем  – оптимальную в некотором смысле оценку текущего значения xi (t).
– оптимальную в некотором смысле оценку текущего значения xi (t).
В процессе полета, при ручном или автоматическом управлении, с помощью системы контроля иногда формируется так называемый индикатор критических режимов

При этом если  , то Δi > 0, если же
, то Δi > 0, если же  , то Δi ≤ 0 и система контроля фиксирует наступление критического режима.
, то Δi ≤ 0 и система контроля фиксирует наступление критического режима.
В общем случае величины (xi)прдоп  (Ωi)прдоп являются функциями ряда параметров и имеют вид
(Ωi)прдоп являются функциями ряда параметров и имеют вид

где ki – параметр, подлежащий определению при проектировании; σ2i – дисперсия погрешностей функционирования информационно-измерительной системы; fi – функции, описывающие закон формирования предупредительной сигнализации.
Задача построения множества допустимых состояний для неустановившихся режимов полета более сложна и в настоящее время еще не получила решения. В отличие от установившегося движения здесь необходимо рассматривать также скорость изменения ограничиваемого параметра системы, который в рассматриваемой ситуации назовем параметром движения.
Введем множество (Ωi)диндоп допустимых значений xi в неустановившемся режиме полета:
(Ωi)диндоп = {xi : (xi н)диндоп < xi < (xвi)диндоп}, ,
где


φнi, φвi – неизвестные функции, подлежащие определению; 
 .
.
В дальнейшем будем рассматривать векторные величины (здесь x обозначает декартово произведение множеств)

При этом будем считать, что критический режим наступил, если хотя бы для одной координаты Δi вектора Δ выполняется неравенство Δi ≤ 0. Кроме того, очевидно, что Xпрдоп Xэ Хдоп.
На рис. 2.2 приведены графические представления указанных выше множеств для двумерного вектора состояния в стационарном случае.

Рис. 2.2
Сформулируем цели и задачи исследований.
1. Рассматривается динамическая система (например, ЛА), на входе которой имеется вектор y(t) входных воздействий, а на выходе – совокупность параметров x(t), подлежащих контролю, ограничению и управлению.
2. Динамическая система предназначена для достижения заранее определенной цели, которая может меняться в процессе функционирования, в том числе по воле человека.
3. Невыполнение поставленной задачи означает собой потери инвестора – создателя динамической системы – и, соответственно, его риск.
4. Каждая динамическая система имеет множество критических состояний, в которых она теряет свои свойства и не способна выполнять поставленные задачи.
5. Ограничимся потерями, обусловленными недостижением цели, которые связаны с выходом контролируемых параметров в критическую область.
6. Область допустимых (докритических) состояний Ωдоп и соответствующие ей значения xдоп изменяются в процессе функционирования и определяются экспериментально или теоретически (например, с помощью метода Ляпунова, теории катастроф).
7. Для предотвращения потерь и наилучшего достижения цели динамическая система имеет системы контроля и управления.
8. Системы контроля, обладая погрешностями, в процессе функционирования динамической системы вычисляют (строят) значения x*доп = xдоп + δxдоп. При этом, как правило, xдоп и x*доп не совпадают.
9. Оператор (человек), используя информационно-измерительную систему, получает для управления измеренные значения контролируемых параметров, которые обозначим xизм.
10. На выходе динамической системы реализуются фактические значения параметров, которые обозначим xф. При этом xизм = xф + δx, где векторный случайный процесс δx – погрешность информационно-измерительной системы.
11. Фактические значения параметров xф, в силу объективных причин, обусловленных внешними возмущениями и внутренними шумами, а также субъективными причинами, свойствами оператора-человека, изменяющимися случайным образом, представляют собой случайные процессы. На этапе проектирования динамической системы векторный процесс xф определяется с помощью математических моделей.
12. Для компенсации влияния δx на величину риска вводятся допустимые по прибору значения xпрдоп и соответствующая им область Ωпрдоп Ωдоп, например, при ограничении сверху xi доп – xпрi доп > 0, . При контроле динамических процессов, когда скорость изменения процесса во времени  , необходимо вводить дополнительный запас
, необходимо вводить дополнительный запас  = k|
= k| | и вектор xдиндоп = xдоп – . В результате имеем Ωдиндоп Ωпрдоп Ωдоп.
| и вектор xдиндоп = xдоп – . В результате имеем Ωдиндоп Ωпрдоп Ωдоп.
13. Предотвращение потерь состоит в обеспечении условия xф(t) Ωдоп(t) для любого момента времени t функционирования динамической системы. Для целей управления оператор располагает величиной xизм, кроме того, система контроля индуцирует оператору не область xдоп, а x*доп. При этом x*доп = xдоп + δxдоп, где δxдоп – погрешность функционирования системы контроля, x*доп Ω*доп. В этих условиях оператор может обеспечить только условие xизм Ω*доп, а это означает, что возможен выход xф из области Ωдоп, что приводит к соответствующим потерям и рискам.
14. В силу того, что процессы xф и xизм являются случайными, в качестве меры риска будем рассматривать вероятности Pi  событий, приводящих к техническим, экономическим, финансовым и другим потерям.
событий, приводящих к техническим, экономическим, финансовым и другим потерям.
15. С учетом сказанного, необходимо разработать показатели риска
Pi = Pi(Ωдоп, Ωдиндоп, Ωпрдоп, Mфk (хф), Моk (хизм), a, b), ,
где Моk (хф) – центральный момент k-го порядка векторного случайного процесса xф; Моk (хизм) – центральный момент k-го порядка векторного случайного процесса xизм; векторные величины a, b – параметры системы.
16. Полученные расчетным путем вероятности Pi уточняются как на этапах экспериментальных испытаний динамической системы, так и в процессе эксплуатации. В последнем случае уточняются как Pi, так и область Ωпрдоп.
2.2. Показатели эксплуатационного риска для ЛА
Риск – это ситуативная характеристика деятельности человека по управлению технической системой, отображающая неопределенность этой деятельности и возможные потери при реализации целевых задач. Под потерями будем понимать:
– потери техники (полная или частичная поломки), связанные с выходом ее параметров движения (состояния) за пределы допустимых значений и обусловливающие финансовые затраты;
– финансовые потери, связанные с неполным использованием технических возможностей системы, например, для ЛА – так называемые полеты при режимах, неоптимальных по расходу топлива;
– потери, связанные с человеческими жертвами.
В дальнейшем под успехом эксплуатации ЛА будем понимать безаварийные (благополучные) полеты, при которых наилучшим образом используются технические возможности ЛА. Для построения показателей эксплуатационного риска рассмотрим схему возникновения летного происшествия.
За счет управлений или возмущений, т. е. воздействий, связанных соответственно с выполнением маневра или появлением непредвиденного аварийного фактора (отказа системы управления, ошибки пилотирования, неблагоприятных внешних условий и т. д.), в момент времени t хотя бы одна компонента xi(t) вектора X параметров состояния динамической системы достигает границы области допустимых значений, а затем выходит за ее пределы. Такое событие обозначим, например, через В = {xi (t) ≥ xвi доп }, при ограничении сверху.
После наступления события A на выходе системы контроля возможно появление одного из двух сигналов-событий:
 или
или  ,
,
где – оценка параметра xi, осуществляемая с помощью информационно-измерительной системы. В первом случае за счет погрешностей функционирования системы контроля летчик получил неверную информацию относительно состояния контролируемого и ограничиваемого параметра xi. Во втором случае система контроля правильно определила состояние динамической системы по контролируемому и ограничиваемому параметру.
Используя эту информацию, летчик формирует управление, в результате чего в момент времени t1 > t наступает одно из двух событий: D = {xi(t ) ≤ xвi доп} или D1 = { xi (t1) ≥ хвi доп }. Событие D возможно, если при наступлении событий A и C летчик принял правильную стратегию управления и своевременно ее реализовал. Событие D1 возможно, если:
– события A и B наступают одновременно;
– события A или C имеют место, но летчик принял неправильное решение по управлению, или время τ реакции летчика больше допустимого времени θ0j пребывания ограничиваемого параметра xi в недопустимой области состояния, когда наступает событие  , где
, где  – вектор допустимых значений θ0i, , подлежащих определению при проектировании системы контроля.
– вектор допустимых значений θ0i, , подлежащих определению при проектировании системы контроля.
В дальнейшем будем рассматривать следующие вероятности: P(B) – вероятность появления события A; P(A | B), P (C ∩ E | B) – условные вероятности того, что летчик пропустил особую ситуацию: когда система контроля не сработала и когда она сработала соответственно; P(D1 | A ∩ B), P(D1 | A ∩ C ∩ E) – условные вероятности того, что летчик вовремя не отреагировал на превышение параметрами движения допустимых значений или принял неправильную стратегию управления. Для большинства режимов полета P(A) представляет собой вероятность усложнения условий пилотирования; P(A)P(A | B) – вероятность опасной ситуации; P(A)P(A | B) P(D2 | A ∩ B), – вероятность аварийной или критической ситуации.
Отметим, что определенная по статистическим материалам летной эксплуатации частота появления события A является нормативной как в отечественном самолетостроении, так и за рубежом. Согласно западно-европейским нормам летной годности FAR-25, в полете выделяют четыре типа особых ситуаций, связанных с появлением события A (т. е. четыре типа летных происшествий): катастрофическая ситуация, аварийная ситуация, опасная ситуация и усложнение условий полета [12]. Максимально допустимая частота этих событий не должна превышать соответственно 10–9, 10–7, 10–5 и 10–3 на 1 час полета [12].
Так как пилот управляет ЛА по сигналам, поступающим от систем контроля, то риск управления будем оценивать с учетом возможностей и этих систем, и пилота. При этом на основе анализа возможных сигналов-событий, формируемых на выходе системы контроля, необходимо выделить те, которые ведут в полете к особой ситуации или снижению эффективности применения ЛА.
Для анализа полетных ситуаций введем следующие гипотезы.
Гипотеза В1. Каждая из координат xi вектора X находится в области допустимых значений, т. е. X  Ωдоп.
Ωдоп.
Гипотеза В2. Хотя бы одна из координат xi находится вне области допустимых значений, т. е. существует хотя бы одно значение i, для которого Хi > Ωвi доп или Хi < Ωнi доп, и X Ωдоп.
При этих двух гипотезах на выходе системы контроля может появиться один из двух сигналов-событий:
A 1={X Ωпрдоп}; A2 = {X Ωпрдоп},
где X = Xизм – измеренное значение X на выходе системы контроля.
Ситуация, когда справедлива гипотеза B1 и выполняется событие A1, соответствует такому функционированию всех систем, в том числе и системы контроля, при котором полетное задание выполняется. Вероятность пересечения этих событий обозначим через P1 = P(B1 ∩ A1).
В случае когда реализуются гипотеза B1 и событие A2, к оператору поступает ложная информация о величине параметров движения. Вероятность такого события P2 = P(B1 ∩ A2).
Рассмотрим гипотезу B2 и событие A2. Эта ситуация соответствует такому функционированию системы контроля, когда основная цель полетного задания не выполняется, т. е. вектор X находится вне области допустимых значений. Такая ситуация обусловлена ошибками пилота при ручном управлении или отказами и погрешностями функционирования систем управления при автоматическом управлении. Вероятность этого события обозначим P3 = P(B2 ∩ A2).
Событие B2 ∩ A1 означает, что текущее значение X достигло границы множества Xдоп, а на выходе системы контроля отсутствует сигнал наступления критического режима. Обозначим вероятность этого события P4 = P(B2 ∩ A1).
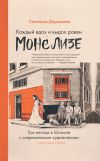
На рис. 2.3 представлена диаграмма событий Bi, Aj (i =1, 2; j =1, 2), где Хn =Хпрдоп; ограничение X сверху.

Рис. 2.3
Для решения задачи анализа необходимо установить связь между вероятностями Pi  , допустимыми значениями векторов X,
, допустимыми значениями векторов X,  , а также плотностями вероятностей векторов X и . С этой целью, учитывая определения, а также, в общем случае, непостоянство во времени Ωдоп, получим:
, а также плотностями вероятностей векторов X и . С этой целью, учитывая определения, а также, в общем случае, непостоянство во времени Ωдоп, получим:

представим рассматриваемые вероятности в виде

При этом риск управления будем характеризовать векторной величиной P = (P2, P3, P4), включающей в себя вероятности P2, P4, обусловленные погрешностями функционирования системы контроля, и вероятность P3 катастрофической ситуации, когда пилот видит по приборам, что ЛА в критической области, но предотвратить эту ситуацию не может. В дальнейшем будем говорить, что P2 = Pлс – вероятность ложной сигнализации; P3 = Pоп – вероятность ошибки пилота (при ручной системе управления); P4 = Pпр – вероятность пропуска опасной ситуации.
В дальнейшем будем предполагать, что множества Ωдоп, Ωпрдоп образуют односвязные жордановы области. Тогда для искомых вероятностей получим:

где  – совместная плотность вероятности компонент векторов X и в момент времени t;
– совместная плотность вероятности компонент векторов X и в момент времени t;  – области, образованные дополнениями к Ωдоп, Ωпрдоп (см. рис. 2.2).
– области, образованные дополнениями к Ωдоп, Ωпрдоп (см. рис. 2.2).
Существуют некоторые режимы полета самолета, для которых события (B1i,A2i), (B2i,A2i), (B2i,A1i), соответствующие ложному срабатыванию, ошибкам летчика и пропуску опасной ситуации для параметров xi вектора X, являются независимыми. При этом, например, P((В1А1) ∩ (В2А2)) = Р(В1А1) + (В2А2) и, в силу малости слагаемых,  . Тогда эти события будут несовместны, поэтому получим:
. Тогда эти события будут несовместны, поэтому получим:

Теперь рассмотрим Pпр и Pлс для компонент вектора X, допускающих выбросы в критическую область на ограниченном интервале времени θ0. Так, например, θ0 для угла атаки – это время развития сваливания и перехода ЛА в новый режим – штопор. При этом получим

Здесь случайная величина θi – интервал времени между моментами времени t1 – выхода xi из Ωдоп – и t2 – входа xi в Ωдоп, а θ0i – допустимая продолжительность выброса xi за уровень xi доп.
Таким образом, для i-го параметра имеем

Приведенная формула позволяет вычислить Pпр для параметров движения, допускающих кратковременные выбросы в недопустимую область, таких, например, как угол атаки α, скорость V, число Маха M, перегрузка ny, центровка xT. При этом W(θi | xi) представляет собой условную плотность распределения длительности θi выброса i-го параметра за фиксированный уровень xi = const, а θ0i зависит от конструктивно-аэродинамических характеристик ЛА и подлежит определению.
В дальнейшем мы ограничимся рассмотрением вероятностей P2 и P4, непосредственно связанных со свойствами системы контроля и объекта управления.
Правообладателям!
Данное произведение размещено по согласованию с ООО "ЛитРес" (20% исходного текста). Если размещение книги нарушает чьи-либо права, то сообщите об этом.Читателям!
Оплатили, но не знаете что делать дальше?