Текст книги "Один на один с врагом: русская школа рукопашного боя"
Автор книги: Алексей Кадочников
Жанр: Спорт и фитнес, Дом и Семья
Возрастные ограничения: +18
сообщить о неприемлемом содержимом
Текущая страница: 6 (всего у книги 14 страниц)
При исследовании движений человека, как правило, возникает необходимость учитывать не только величину массы, но и ее распределение в теле. На распределение массы тела указывает расположение так называемого центра масс тела.
Центром масс (ЦМ) тела или системы тел называют воображаемую точку, в которой как бы сосредоточена вся масса тела или системы.
Понятие центра масс оказывается существенным тогда, когда в данных условиях движения тело нельзя рассматривать как материальную точку, пренебрегая его размерами.
Положение общего ЦМ рабочей модели человека как биомеханической системы рассчитывается по известной формуле механики:

где yцм – координата общего ЦМ модели относительно начала отсчета;
n – число звеньев тела;
m1 – масса i-го звена тела (или суммарная масса симметричных звеньев);
y1 – координата ЦМ i-го звена тела;
М = φmi – общая масса модели тела (сумма масс mi).
Таким образом, положение общего ЦМ модели зависит от расположения масс m отдельных частей тела относительно выбранного начала отсчета. При изменении позы меняется положение звеньев тела, а следовательно, меняется и положение общего центра масс.
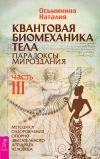
Данные для определения масс mi и координат yi центров масс отдельных звеньев тела (в % от общей массы и полного роста человека) приведены в левой части таблицы 4, составленной на основании экспериментальных данных американской службы NАSА.
В правой части таблицы приведены расчетные значения mi и yi для конкретных исходных данных (рост 170 см, масса 80 кг) рабочей модели, изображенной на рисунке внутри таблицы.
При подстановке полученных расчетных значений mi, yi в формулу для определения общего ЦМ имеем:
Уцм = m1y1 + m2y2 +… + mnyn): M = (5,5.159+2,65.2.121,9+…+1,35.2.3,1):80 = 98,6 cм.
В основной стойке (руки вдоль туловища) координата уцм составляет 58 % от полного роста, т. е. уцм = 0,58 L (см). А значит, положение общего ЦМ модели находится очень легко. Так, при росте 190 см координата ЦМ в основной стойке:
уцм= 0,58 . 190 = 110,2 см (от пола).
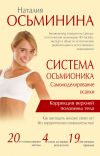
Изложенная выше методика позволяет достаточно просто находить положение ЦМ модели и при изменении позы человека. Например, для тех же исходных данных (рост 170 см, масса 80 кг) в стойке с верхней рамкой (рис. 37) координата Уцм = 98,1 см; в «гимнастической» позе (рис. 37) Уцм = 109,1 см.
При сложной позе тела рекомендуется вычертить рабочую модель на масштабной бумаге («миллиметровке»). Это позволяет определять координаты ЦМ отдельных звеньев тела с очень высокой точностью.
Определение моментов инерции моделиМомент инерции тела есть мера инертности тела при вращательном движении.
Моментом инерции модели (системы тел) относительно некоторой оси называется физическая величина, равная сумме произведений масс mi отдельных звеньев (тел) на квадрат их расстояний ri от рассматриваемой оси:

Это означает, что в деформирующейся биомеханической системе тел, когда ее звенья отдаляются от оси вращения, момент инерции системы увеличивается.
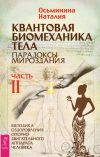
Основными факторами, влияющими на момент инерции, являются масса и длина тела. На рис. 38 показана зависимость момента инерции (в условных единицах) от позы тела и положения оси вращения. Как видно, изменением позы можно очень сильно влиять на момент инерции. Например, группировка при выполнении сальто (в) уменьшает момент инерции по сравнению с прямым положением тела (г) в три раза.
Момент инерции тела I0 относительно оси вращения, проходящей через ЦМ, называется центральным.
При его определении можно воспользоваться данными таблицы 4. Расстояния ri относительно оси вращения О—О определяются просто.
Для звеньев тела, расположенных выше оси:
ri = yi – yцм;
для остальных звеньев, расположенных ниже оси:
ri = yцм – yi.
Центральный момент инерции модели:
Таблица 4


Рис. 36

Рис. 37
I0 = ∑miri2 = (m1r12 + m2r22 +…+ mnrn2) = (5,5.60,4+2,65.2.30+…+1,35.2.95,5)=1,3 кг м2.
В других случаях предварительно следует вычертить рабочую модель в масштабе и произвести предварительные расчеты.
Момент инерции относительно любой оси, параллельной центральной, можно рассчитать по формуле:
Ic = Io + mil2,
где Ic – искомый момент инерции;
Io – центральный момент инерции;
mi – масса звена;
l – расстояние между осями.

Рис. 38
Инерционное сопротивление увеличивается с отдалением частей тела от оси вращения пропорционально квадрату расстояния. Поскольку материальные точки в теле расположены на разных расстояниях от оси вращения, для ряда задач оказалось удобным ввести понятие «радиуса инерции».
Радиус инерции Rин – это сравнительная мера инертности данного тела относительно его разных осей. Из выражения для момента инерции относительно данной оси I = MRин2 следует:

где М – масса тела.
Найдя опытным путем момент инерции Io, можно рассчитать радиус инерции Rин, величина которого характеризует распределение материальных точек в теле относительно данной оси. Но точное количественное определение этой величины в конкретных случаях нередко затруднено.
Инерционно-массовые характеристики, такие, как масса тела, положение центра масс, величина момента инерции, оказывают существенное влияние на параметры устойчивости, а также на инерционное сопротивление тела вращательному движению.
В частности, чем больше инерционное сопротивление тела, тем меньше угловая скорость его вращения. Например, при вращении тела вокруг вертикальной оси (рис. 38а) с угловой скоростью φ1 увеличение инерционного сопротивления (I2>I1) разведением рук в стороны (рис. 38б) приводит к уменьшению угловой скорости (φ1<φ1).
Прочность биологических материаловОпорно-двигательный аппарат человека должен противостоять нагрузкам, обусловленным, во-первых, действием собственного веса и, во-вторых, ускорениями, которые всегда сопровождают любое движение. Особенно большие, хотя и кратковременные нагрузки скелет человека испытывает при ударах, прыжках, падениях и в аварийных ситуациях. Действующие при этом силы могут в 15–30 раз превышать собственный вес человеческого тела.
При нагрузке кости мышцы и сухожилия как упругие материалы деформируются. На примере тела человека можно проследить все виды деформаций: сжатие, растяжение, изгиб, кручение. Так, кости позвоночника и нижних конечностей в основном подвергаются сжатию и изгибу. Кости верхних конечностей, мышцы, связки, сухожилия – растяжению. Кручению подвержены шея, туловище в пояснице, кисти рук.
Наука о прочности и деформируемости различных материалов и элементов конструкций называется сопротивлением материалов. Под прочностью понимают способность материалов сопротивляться действию внешних сил. Количественной характеристикой способности любого материала сопротивляться разрушению под действием внешних нагрузок служит предел прочности.
По прочности кость человека не уступает некоторым известным материалам и даже металлам. Так, например, предел прочности кости на растяжение в 3 раза больше, чем у древесины вдоль волокон, в 9 раз превышает предел прочности свинца и почти равен пределу прочности алюминия и чугуна. А предел прочности кости на сжатие в 5 раз больше, чем у древесины (вдоль волокон), и превосходит предел прочности бетона в 6–8 раз.
В расчетах на прочность закладывают 3–10-кратный запас прочности. Это означает, что рабочее сечение образца нужно подбирать таким образом, чтобы реальные напряжения в нем были в 3–10 раз меньше указанных в таблице.
Высокая механическая прочность кости человека (впрочем, как и многих животных) обусловлена свойствами исходных компонентов материала кости и ее особым строением. Кость состоит из органических волокон (коллагена), неорганических кристаллов гидроапатита, связующих веществ и воды. Реакция каждого из этих материалов на механические нагрузки различна и сравнительно невелика. И только в сочетании эти компоненты дают прочность, сравнимую с прочностью металлов.
Большое значение для прочности костей человека имеют их конструктивные особенности. Трубчатые сечения (рис. 39а) обеспечивают единство двух взаимоисключающих качеств: прочности и минимального веса.
Интересными особенностями отличается также внутреннее строение пустотелых костей. На рисунке 39б показан полусхематический разрез тазобедренного шарового сустава. Пересекающиеся линии на рисунке – это система тонких внутренних перемычек. Они ориентированы вдоль направлений возможных механических напряжений, возникающих при тех или иных деформациях нагружаемой кости.
Эти перемычки образуются в процессе роста костей под действием внешних нагрузок. При этом реакция костной системы на разрушающие деформации заключается в пассивной ориентировке волокон в направлении тяги. Напрашивается интересный вывод: чем большие нагрузки испытывают кости растущего организма, тем прочнее они становятся.

Рис. 39
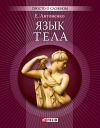
Рассмотренные конструктивные особенности строения кости делают ее способной выдерживать огромные нагрузки. Например, при статических испытаниях на прочность бедренная кость (рис. 40а) выдерживала нагрузку F1 = 15 кН (1500 кгс), то есть в 15–20 раз превышающую вес человека. Тазобедренная кость (рис. 40б), поставленная вертикально, в том же опыте выдерживала груз весом F2 = 50 кН (вес автомобиля «Волга»!).
Но прочность ноги определяется самым тонким, а значит, и самым уязвимым ее местом – берцовой костью голени, площадь поперечного сечения которой всего S = 2,8 см2. Требуемое значение предела прочности кости: [φ] = 1,2 . 108Па (1200 кгс/см2).

Рис. 40
Тогда по условию прочности предельно допустимая нагрузка на одну ногу Р = S[φ] = 2,8.10 – 4.1,2.108 = 3,36.104H(3360 кгс), то есть при превышающей нагрузке голень ломается.
Проанализируем нагрузки, которые возникают в экстремальных ситуациях (при прыжках, падениях и пр.). В качестве примера рассмотрим прыжок человека массой М = 70 кг с высоты h = 5 м.
Вероятны два случая:
1. Человек после прыжка приземляется, сгибая ноги в коленях. При расчете примем, что перемещение тела при приземлении составляет φl = 0,5 м; ускорение g =10 м/с2.
Нагрузка на голень при столкновении с землей: Р1 = mgh/φl = 70.10.5/0,5 = 0,7.104 Н (700/кгс). Так как Р1<Р, прыжок, скорее всего, закончится весьма благополучно.
2. Человек приземляется, не сгибая ноги в коленях. При расчете примем, что перемещение тела при этом составляет φl = 1 см.
Тогда сила, действующая на голень при столкновении с землей, равна
P2 = 70.10.5/1.10-2 = 3,5 . 104 Н (3500 кгс).
Прыжок в этом случае, к сожалению, закончится плачевно, так как Р2 > Р.
Вот почему при прыжке с заданной высоты ноги следует держать вместе, полусогнутыми. Это относится и к случаю приземления при прыжке с парашютом. Если перед столкновением с землей не удалось развернуться по ветру, то при боковом сносе ни в коем случае нельзя выбрасывать ногу навстречу приближающейся земле, пытаясь избежать падения.
Трудности управления движениямиУправление движениями тела – эта как будто совершенно естественная и сама собою разумеющаяся вещь – оказывается очень сложным процессом, требующим совместного и согласованного участия очень многих физиологических систем и устройств.
Сложность управления опорно-двигательным аппаратом является, по Бернштейну, «многотрудной» задачей.
Первая трудность
Потребность непрерывного распределения внимания между десятками подвижных шарниров, если бы все элементы сложного движения должны были управляться сознательно, с обращением внимания на каждый из них.
Вторая трудность
Необходимость преодоления непомерно огромного избытка степеней подвижности, которыми насыщено тело человека.
Третья трудность
Управление движениями посредством упругих тяг, каковыми являются мышцы опорно-двигательного аппарата человека.
Управление движениями в физиологии называют координацией движений.
Координация движений есть не что иное, как преодоление избыточной подвижности органов движения, то есть превращение их в управляемые системы. Нетрудно дать точное обозначение и тому основному принципу, который позволил природе обеспечить управляемость костно-мышечных двигательных аппаратов, принципу, опирающемуся на контролирование движений органами чувств. Это принцип внесения непрерывных поправок в движение на основании «донесений» органов чувств – то, что на языке артиллеристов называется корректировкой стрельбы. В физиологии его называют принципом сенсорных коррекций. Мышечно-суставная чувствительность является основной и ведущей в преобладающем большинстве случаев управления движениями. Вся совокупность органов этого вида чувствительности собственного тела называется проприоцептивной системой. Чувствительные окончания органов этой системы (рецепторы) рассеяны повсеместно в мышечных пучках, в сухожилиях, в суставных сумках. Они сигнализируют о положении звеньев тела, о суставных углах, о напряжениях в мышцах и т. д. Вся сигнализация этой системы дает мозгу исчерпывающие сведения как о положении всего тела в пространстве, так и о положении и движениях отдельных его частей. Таким образом, основным принципом, который позволил природе преодолеть избыток степеней подвижности и обеспечить управление двигательным аппаратом, является принцип, опирающийся на контролирование движений посредством органов чувств.
Зрение – главенствующий орган чувств у человека – участвует в управлении огромным количеством движений. Это, по преимуществу, точные ручные рабочие операции, метательные движения, требующие прицеливания (стрельба, метания в цель, игровые виды спорта). Осязание соучаствует со зрением в большинстве точных движений тела и его частей в пространстве, а также в большом количестве трудовых операций. Слух мобилизуется в меньшей мере вкупе с другими органами чувств. Но чаще всего бывает очень трудно расчленить роли перечисленных органов чувств в коррекции сложных движений.
Основной принцип, который позволил природе преодолеть избыток степеней подвижности, – контролирование движений посредством органов чувств.
Основы биомеханики мышц
Известно, что мышца управляется центральной нервной системой. Биомеханика рассматривает, что происходит с состоянием и положением мышцы в результате нервных влияний, т. е. связь линейных перемещений концов мышц (кинематика движения) и усилий, развиваемых ею (динамика движения). Механика мышечного сокращения заключается в связи напряжений в мышце с её деформацией.
Для полного описания биомеханических свойств мышц используют следующие определения:
– жёсткость – способность противодействовать прикладываемым силам. Она проявляется как упругость и квазижесткость;
– релаксация – падение напряжения (натяжения) с течением времени;
– прочность – понимается как прочность на разрыв.
Часто при исследовании механических свойств тела человека и его отдельных элементов не учитывается влияние сухожилий. Сухожилия нередко рассматривают как абсолютно нерастяжимую, гибкую часть мышцы. А сухожилия способны амортизировать резкие толчки и обладают жёстко-демпфирующими свойствами.
Прочность сухожилий превышает прочность мышц в 2 раза. Сухожилия человека разрываются в основном в месте крепления к мышцам.
Сила, скорость и экономичность движений зависят от того, в какой степени человеку удаётся использовать биомеханические свойства своего двигательного аппарата. Сила и скорость движения могут быть повышены за счёт использования упругих сил, экономичность – за счёт использования рекуперации (повторного использования) механической энергии и уменьшения потерь на рассеивание.
Кроме того, необходимо знать, что с возрастанием скорости активного сокращения мышцы величина её предельного напряжения уменьшается, и наоборот, т. е. для того, чтобы нанести как можно более быстрый (резкий) удар (рукой или ногой), необходимо как можно больше расслабить ту часть тела, которая наносит этот удар, перед выполнением ударного движения.
Биомеханические свойства мышц в решающей мере влияют на это. Общеизвестно, что в прыжках вверх с места, выполняемых из приседа после паузы, результат будет ниже, чем в прыжке из приседа без паузы, так как во втором случае используются силы упругой деформации предварительно растянутых мышц. Считается, что рекуперация энергии упругой деформации является основной причиной высокой экономичности бега человека, прыжков кенгуру.
В мышечных и сухожильных структурах может накапливаться значительное количество энергии упругой деформации. Однако накопленная энергия упругой деформации не всегда используется в полной мере. Степень её использования зависит от условий выполнения движений, в частности, от времени между растяжением и сокращением мышцы. Необходимо научиться правильно использовать эту энергию при действиях в рукопашном бою. В процессе тренировок надо учитывать, что механическая прочность сухожилий и связок увеличивается сравнительно медленно. При форсированном развитии скоростно-силовых качеств может возникнуть несоответствие между возросшими скоростно-силовыми возможностями мышечного аппарата и недостаточной прочностью связок и сухожилий. Это грозит потенциальными травмами. Поэтому во время тренировок необходимо обращать внимание на укрепление сухожильно-связочного аппарата. Это достигается объёмной тренировочной работой невысокой интенсивности. Желательно, чтобы движения выполнялись с максимально возможной для данного сустава амплитудой и во всех направлениях.
Структура ударов и их биомеханикаЭлементом двигательного действия является временная структурная единица – фаза.
Фаза – это последовательность двигательных действий, решающая конкретную двигательную задачу; меняется двигательная задача – меняется фаза. Введение данного понятия позволяет разложить сложный двигательный акт на составляющие, что важно как для его анализа, так и в процессе обучения. Особенно это важно при рассмотрении быстропротекающих и кратковременных процессов, например, таких, как удар.
В рукопашном бою ударные элементы являются одной из важных составляющих, поэтому рассмотрению этого понятия – «удар» – и связанным с ним процессам стоит уделить серьезное внимание.
Удар как физическое явление – это кратковременное взаимодействие двух (или более) тел, при котором возникают большие по величине силы.
В биомеханике различают следующие фазы удара:
1. Замах (отталкивание) – движение, предшествующее ударному движению и приводящее к увеличению расстояния между ударным звеном тела и предметом, по которому наносится удар. Эта фаза наиболее вариативна.
2. Предударное движение – от конца замаха до начала удара.
3. Ударное взаимодействие (или собственно удар) – столкновение ударяющихся тел.
4. Послеударное движение – движение ударного звена тела после прекращения контакта с предметом-целью, по которому наносится удар.
Главной фазой является ударное взаимодействие, которое характеризуется импульсом силы. Импульс силы равен произведению силы на время действия силы (в поступательном движении); это мера воздействия силы на тело за данный промежуток времени (рис. 40).

Рис. 40
Графически импульс силы определяется площадью под кривой зависимости силы от времени (t1 и t2 – моменты времени, соответствующие началу и концу ударного взаимодействия; t = t2 – t1). Данный график показывает, что эргономически не выгодны концентрированные, мощные и редкие удары, а более рационально использование движений, задействующих не более 50 % физического потенциала бойца, но при этом сохраняющих его работоспособность в течение всего промежутка схватки.
В механике удары делятся на:
– центральные (если тела до удара движутся вдоль прямой, проходящей через их центры масс);
– прямые (если скорость V центра масс тела в начале удара направлена по нормали n в направлении к другому телу);
– косые (если вектор скорости центра масс отличен от нормали).
Теория удара разработана И. Ньютоном. В процессе ударного взаимодействия происходит механическая деформация тела; кинетическая энергия движения переходит в потенциальную энергию упругой деформации, затем эта энергия вновь частично превращается в кинетическую энергию движения, а частично рассеивается (переходит в тепло). В зависимости от того, каковы потери на рассеивание энергии упругой деформации, удары делятся на:
а) вполне упругие (отсутствуют потери на рассеивание, например, удар по биллиардному шару);
б) не вполне упругие (лишь часть энергии упругой деформации переходит в кинетическую энергию; например, удары в спортивных играх по мячу);
в) неупругие (энергия упругой деформации вся переходит в тепло, например, удары в боксе, каратэ, приземления в прыжках, соскоках).
В теории удара в механике предполагается, что удар происходит настолько быстро и ударные силы настолько велики, что всеми остальными силами можно пренебречь. Однако многие действия в рукопашном бою нельзя рассматривать как «чистый» удар, и в них такие допущения неоправданны.
Время удара в рукопашном бою (да и в таких видах спорта, как бокс, каратэ и т. п.) хотя и мало, но пренебречь им нельзя; путь ударного взаимодействия, по которому во время удара движутся вместе соударяющиеся тела (например, в спортивном РБ, боксе и т. п.), может достигать 20–30 см.
В таких случаях ударное взаимодействие внешне проявляется как сложное движение, т. е. включает в себя элементы как поступательного, так и вращательного движения, т. е. фаза ударного взаимодействия характеризуется суммой импульса силы и импульса момента силы:
F*t + Mf*t,
где: Мf – момент силы, t – время действия момента силы.
При совершении во время удара, кроме поступательного, ещё и вращательного движения ударной поверхности, телу, по которому наносится удар, передаётся механическое движение в виде вращательного. В этом случае увеличивается так называемая «ударная» масса. Величина её не постоянна. Если, например, выполнять удар за счёт сгибания кисти или с расслабленной кистью, то тело, по которому ударяют, будет взаимодействовать только с массой кисти. Если же в момент удара ударяющее звено закреплено активностью мышц-антагонистов (сочленение «кисть-предплечье») и представляет собой как бы единое твёрдое тело, то в ударном взаимодействии будет принимать участие масса всех жёстко закреплённых звеньев. Можно не отличаться большой мышечной массой, но владеть при этом очень сильным ударом. Чем больше элемент вращательного движения, тем больше «ударная» масса и тем более сильный удар можно нанести. Таким образом, в рукопашном бою удар, в основном имеет целью обеспечить большую силу ударного взаимодействия и за счёт заданной траектории движения обеспечить попадание в конкретную конечную точку. Обеспечить большую силу удара можно, во-первых, за счёт придания максимальной скорости ударяющему звену в момент ударного взаимодействия и, во-вторых, за счёт увеличения «ударной» массы.
В теории управления перемещающими действиями выявлена закономерность в передаче движения между звеньями тела: последовательно разгоняются звенья тела, начиная с более массивных, т. е. на максимуме скорости предыдущего, более массивного звена, начинается рост скорости последующего, менее массивного звена.
С позиций механики ясно, что чем меньше масса звена, тем большую скорость это звено может развить, а анатомически менее массивные звенья тела способны к более координированным движениям.
Увеличить силу удара можно и за счёт увеличения «ударной» массы в момент ударного взаимодействия. Это достигается «закреплением» (например, в боксе, каратэ и т. п.) отдельных звеньев ударяющего сегмента путём одновременного включения мышц-антагонистов и увеличения радиуса вращения.
Удар является настолько кратковременным процессом, что исправить допущенные ошибки практически невозможно. Поэтому точность удара в решающей мере обеспечивается правильными действиями при отталкивании и предударном движении.
При рассмотрении понятия «удар» в рукопашном бою для нас важно следующее:
1. На встречном движении при ударе (столкновении) тел их скорости складываются.
2. Чем меньше площадь, на которую приходится удар, при прочих равных условиях, тем больше поражающий эффект при ударе.
3. Время удара имеет прямую зависимость от массы тела, величины совместного смещения и обратную зависимость от силы удара.
Необходимо отметить, что удар является мощным средством внезапного поражения противника и часто, но далеко не всегда, решает исход боя.
Удары имеют три основных недостатка:
– удар сложно дозировать;
– при нанесении удара можно пораниться, что снизит боеспособность;
– одежда (особенно зимняя) и экипировка («разгрузка», бронежилет и т. п.) являются хорошей защитой от многих типов ударов.
Правообладателям!
Это произведение, предположительно, находится в статусе 'public domain'. Если это не так и размещение материала нарушает чьи-либо права, то сообщите нам об этом.