Читать книгу "Физика движения. Альтернативная теоретическая механика, или Осознание знания. Книга в двух томах. Том II"
Автор книги: Александр Астахов
Жанр: Физика, Наука и Образование
Возрастные ограничения: 12+
сообщить о неприемлемом содержимом
12.2. Силы, действующие в инерцоиде без учёта инерции движения грузов по окружности
Для того чтобы обосновать или опровергнуть безопорное движение, как реально наблюдаемое в природе явление, недостаточно голословного отрицания со ссылкой на закон сохранения импульса. Не вызывает также доверия и обоснование безопорного движения с помощью феноменологических теорий. Грузы и тележка совершают сложное движение, в котором нелегко разглядеть причину реально наблюдаемого поступательного перемещения инерцоидов. Необходима детальная проработка механизма движения инерцоида с точки зрения фундаментальных законов природы. И только взвесив все «за» и «против» можно сделать какие-то выводы.
В процессе вращения грузов под действием привода инерцоида между грузами и тележкой происходит реактивное взаимодействие. Рассмотрим реактивное взаимодействие грузов и тележки только с точки зрения взаимодействия их реальных масс без учёта инерции их движения. Причем под реактивным движением будем понимать не только классическое движение с отбрасыванием масс, но и движение по сближению материальных тел при взаимодействии друг с другом.
Будем считать, что энергия взаимодействия распределяется между взаимодействующими телами и полностью преобразуется в кинетическую энергию движения взаимодействующих тел по линии взаимодействия со скоростями обратно пропорциональными соотношению их масс (Рис. 12.2.1). При этом линиями взаимодействия между двумя равными по массе телами: тележкой и грузами будем считать оси (ОХ) и (OY).
Полный цикл реактивного взаимодействия грузов и тележки вдоль каждой из осей координат происходит на отрезке их максимального сближения или максимального расхождения вдоль выбранных осей в зависимости от фазы процесса. Максимальное сближение и максимальное расхождение между грузами и тележкой определяется размерами физического радиуса вращения грузов. Поэтому законченным циклом реактивного взаимодействия будем считать взаимодействие грузов и тележки вдоль осей координат в пределах величины физического радиуса вращения грузов.
Рассмотрим реактивное взаимодействие грузов и тележки в правой полуплоскости относительно оси (ОY) на примере одной первой (I) четверти вращательного движения.

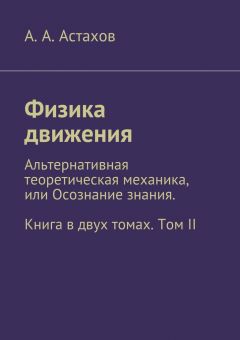
Рис. 12.2.1
На рисунке 12.2.1 изображена эквивалентная схема инерцоида с приводом вращения грузов, поясняющая действие сил, возникающих в процессе реактивного взаимодействия грузов и тележки. Инерцоид на Рис. 12.2.1 представлен в виде жесткой балки на колесах (Т) и рамки привода (П), между которыми расположены две пружины. Внутри рамки привода находится еще одна пружина, установленная между грузами.
Пусть изначально пружины между (Т) и (П) находятся в растянутом состоянии, а пружина между грузами в сжатом состоянии. Пружины приводят в движение грузы (Г1), (Г2) посредством рамки привода (П). На Рис.12.2.1 инерцоид находится в фазе, когда пружины между (Т) и (П) сжимаются, а пружина между грузами расправляется.
Чтобы смоделировать вращение грузов в левой по рисунку 12.2.1 полуплоскости сделаем допущение, что при переходе грузами оси (ОУ) пружины мгновенно заменяются другими аналогичными пружинами, но работающими в противоположном направлении. После достижения «грузами» крайней левой относительно рисунка точки, можно опять допустить соответствующую замену пружин и т. д. до завершения полного оборота грузов. Таким образом, мы получим эквивалентную схему реального привода вращения грузов в инерцоиде.
Привод обычно установлен на тележке и входит в общую массу тележки, поэтому будем считать, что масса рамки привода (П) и пружин, которые вместе собственно, и являются эквивалентом привода, сосредоточена в центре тяжести тележки (Цтт), т.е. будем считать, что привод, который изображен на рисунке отдельно от тележки, не имеет массы. Чтобы не загромождать рисунок схема действия сил показана на примере одного груза (Г1) и сил реакции, проявляющихся в процессе реактивного взаимодействия груза (Г1) и тележки (Т).
Поскольку схема инерцоида абсолютно симметрична, то силы действующие на груз (Г2) и реакция на них тележки и рычагов зеркально симметричны относительно оси (ОХ) силам, показанным для груза (Г1).. Нумерация четвертей по ходу движения груза (Г1) выполнена основным текстом. Учитывая, что груз (Г2) движется в противоположную сторону, то для груза (Г2) первой четвертью будет четвертая четверть на рисунке. Нумерация четвертей по ходу движения груза (Г2) обозначена в скобках.
На груз (Г1) действует сила привода вдоль продольной оси (-Fпх). Кроме того, со стороны рычага и части рамки (П), заключенной между грузами, на груз (Г1) действуют сила реакции рычага (Fр) и сила привода (Fпу) вдоль поперечной оси (ОУ).
Чтобы определить результирующую силу, действующую вдоль оси (ОХ) на груз (Г1) сначала найдем равнодействующую сил реакции рычага (Fр) и привода (Fпу). Сложив их по правилу параллелограмма определим равнодействующую этих сил – суммарную силу привода и реакции (Fпрх).
Затем определим равнодействующую всех сил, действующих на груз (Г1). Сложив по правилу параллелограмма силу (Fпрх) с силой (-Fпх) получим силу окружную (Fокр). Проекция силы (Fокр) на ось (ОХ) действует на груз (Г1) вдоль оси (ОХ) с силой груза вдоль продольной оси (Fгх). На общий центр тяжести грузов (Цтгг) вдоль оси (ОХ) действует удвоенная сила грузов (2Fгх).
На тележку со стороны одного груза (Г1) действует сила привода (Fпх) и сила реакции рычага (-Fр). Кроме того, рычаги воздействуют на тележку с силой привода (±Fпу). Ответные на это воздействие силы реакции со стороны тележки это силы реакции тележки (Fрту) и (-Fрту). Эти силы равны по величине и противоположны по направлению и действуют вдоль одной линии. Следовательно, все силы, действующие на тележку вдоль оси (OY) со стороны грузов под действием привода или инерции грузов, взаимно компенсируются и их можно не учитывать.
По правилу параллелограмма определим равнодействующую силы реакции рычага и силы привода в центре тяжести тележки, т.е. суммарную силу реакции и привода (Fрп). Проекцией силы (Fрп) на ось (ОХ) является сила тележки (Fтх). Это сила, действующая на тележку при ее взаимодействии с одним грузом (Г1). Если учесть второй груз (Г2), то суммарная сила, действующая на тележку со стороны грузов будет равна удвоенной силе, действующей на тележку (Fтх) вдоль оси (ОХ), т.е. это сила (2Fтх).
В соответствии с третьим законом Ньютона:
– 2Fхг = +2Fхт
Время взаимодействия (t) является общим для действия каждой из этих сил. Следовательно, импульсы сил, полученные тележкой и грузами вдоль оси (ОХ) в результате их реактивного сближения в первой четверти вращения грузов равны по величине и противоположны по направлению:
– t * 2Fгх = + t * 2Fтх
или:
– t * 2Fгх + t * 2Fтх = 0
Таким образом, в фазе реактивного сближения грузов и тележки в первой четверти вращения для каждого из грузов суммарное изменение импульса движения инерцоида относительно оси (ОХ) равно нулю. Это означает, что если остановить движение грузов и тележки при пересечении грузами поперечной оси (ОY), то импульс замкнутой системы инерцоида также будет равен нулю.

Рис. 12.2.2
Когда грузы пересекают ось (ОY) и оказываются во второй четверти, наступает фаза реактивного расхождения грузов с тележкой. В механизме их реактивного взаимодействия с тележкой принципиально ничего не меняется. Поэтому суммарное изменение импульса движения инерцоида вдоль продольной оси при прохождении грузами второй четверти кругового движения также равно нулю (см. Рис. 12.2.2). В третьей четверти вновь наступает фаза реактивного сближения, а в четвертой – фаза реактивного расхождения.
Совершенно аналогично можно показать, что в каждой последующей четверти кругового движения тела «грузы» суммарный импульс движения инерцоида относительно оси (ОХ) за счет реактивного взаимодействия реальных масс без учёта инерции их движения не изменится. Следовательно, за полный оборот грузов в процессе их реактивного взаимодействия с тележкой без учёта влияния инерции кругового движения грузов, изменения импульса движения инерцоида вдоль оси (ОХ) не происходит в полнм соответствии с законом сохранения импульса. Что касается сохранения импульса при реактивном взаимодействии грузов и тележки относительно оси (OY), то здесь все гораздо проще.
По сути дела вдоль поперечной оси грузы через тело тележки и связующие рычаги взаимодействуют только между собой. В соответствии с законом сохранения импульса общий импульс системы из двух одинаковых тел при взаимодействии между собой не изменяется. Следовательно, движение грузов вдоль оси (ОУ) не оказывает никакого влияния на движение тележки и инерцоида в целом в этом направлении.
Рычаг груза (Г1) под действием силы привода (+Fпу) стремится переместиться вдоль поперечной оси в положительном направлении (см. Рис.12.2.1). Поэтому на левый конец рычага (Г1) действует ответная сила реакции тележки (-Fрту). Соответственно на левый конец рычага (Г2), который под действием силы привода (-Fпу) стремиться переместится вдоль поперечной оси (ОY) в отрицательном направлении, действует сила реакции тележки (+Fрту). При этом силы привода (±Fпу) компенсируются силами реакции тележки (±Fрту). Общий импульс движения инерцоида вдоль поперечной оси при этом не изменяется. На рисунке 12.2.1 легко видеть, что все поперечные составляющие сил, действующих между грузами, взаимно компенсируются.
Силы, связанные с инерцией движения грузов на Рис. 12.2.1 не показаны. Однако с какой бы силой ни взаимодействовали между собой грузы, и какую бы инерцию они при этом ни приобретали – полная симметрия относительно оси (ОХ) при синфазном движении грузов по окружности в противоположных направлениях гарантирует полную взаимную компенсацию их воздействия на импульс движения инерцоида вдоль поперечной оси (ОУ).
Таким образом, силы привода (±Fпу) и силы инерции движения грузов по окружности, действующие на тележку вдоль поперечной оси (OY) не приводят к реактивному движению тележки и изменению импульса движения инерцоида в целом вдоль поперечной оси (ОY).
12.3. Теоретическое обоснование безопорного движения
С учётом инерции движения грузов по окружности характер взаимодействия между грузами и тележкой изменяется. Дополнительная инерция движения грузов по окружности при взаимодействии с тележкой приводит к изменению импульса движения инерцоида вдоль продольной оси. Как показано в главе (1.2.) в подразделе «Мера взаимодействия», любая сила, возникающая в процессе преобразования напряжение-движение, оказывает действие абсолютно аналогичное инертному сопротивлению массы, т.е. второй закон Ньютона принципиально определяет, в том числе и силу инерции, которая вовсе не сопротивляется движению. Сила – это продукт преобразования движения, так же, как собственно и движение – это продукт преобразования силы. Движению сопротивляется другое движение.
Таким образом, полное сопротивление изменению состояния движения тел зависит не только от инерционного сопротивления массы, как меры количества вещества в теле, но и от внешних противодействующих сил, в том числе и от сил инерции поэлементной поддержки, возникающих при взаимодействии тел, имеющих разные скорости в абсолютной ИСО. В инерцоиде происходит именно такое взаимодействие. Поэтому физический принцип движения инерцоида покажем на примере взаимодействия двух тел, обладающих разной инерцией движения относительно абсолютной системы координат. Рассмотрим взаимодействие двух тел одинаковой массы (см. Рис. 12.3.1), в котором одно из тел (Т2) имеет избыточную по сравнению с телом (Т1) инерцию (скорость) движения.
Какую бы абсолютную скорость не имели бы изначально взаимодействующие тела, ИСО всегда можно связать с одним из них и таким образом свести его абсолютную скорость к нулю. Поэтому пусть для простоты скорость тела (Т1) в абсолютной системе отсчёта (ХОУ) равна нулю (V1 = 0), а скорость тела (Т2) равна (V2). Тогда при объединении тела (Т1) и (Т2) в общую систему тел силе объединяющего невесомого привода, например, в виде упругого связующего тела (на Рис. 12.3.1 для простоты не показано) придётся преобразовывать разную инерцию (скорость) их движения в общее напряжение. Соответственно это напряжение в дальнейшем будет по-разному преобразовываться в их новое движение, чем, если бы это происходило при взаимодействии между относительно неподвижными телами.

Рис. 12.3.1
Пусть привод изначально закреплённый за неподвижное тело (Т1) захватывает на ходу подвижное тело (Т2). Это эквивалентно ударному лобовому воздействию тела (Т2) на тело (Т1). При неупругом объединении тел в общую систему её скорость будет равна половине скорости тела (Т2), т.е. вся система будет двигаться в направлении первоначального движения тела (Т2). Это означает, что привод вместе с телом (Т1) не смогли преодолеть инерцию движения тела (Т2) и вместе с телом (Т1) были увлечены телом (Т2). А вот при взаимодействии между относительно неподвижными телами при помощи активного привода, тела получили бы в той же ИСО одинаковую скорость навстречу друг другу, что свидетельствует об их одинаковом инерционном сопротивлении приводу и соответственно об одинаково успешном преодолении каждого из них приводом.
Можно показать, что взаимодействие по объединению одинаковых по массе тел (Т1) и (Т2) в общую систему тел с учётом их реальных скоростей эквивалентно взаимодействию между неподвижными телами за счёт активного привода, в котором однако взаимодействующие массы уже не равны между собой по оказываемому ими сопротивлению приводу, которое в этом случае можно рассматривать, как эквивалентное инерционное сопротивление эквивалентных масс. При этом эквивалентная масса тела (Т2) в таком эквивалентном взаимодействии возрастёт по сравнению с массой, равной исключительно только «голому» количеству его вещества, прямо пропорционально его скорости. Такое эквивалентное взаимодействие можно наглядно и образно смоделировать при помощи реальных масс даже не вводя их во взаимодействие.
Пусть тела (Т1) и (Т2) представляют собой два пустых сосуда с массой (m) Изменяя количество воды, например, в сосуде (Т2), можно изменять его массу. При этом с увеличением массы тела (Т2) центр масс системы неподвижных тел (Т1) и (Т2) будет иметь эквивалентное смещение в сторону тела (Т2), точно так же, как если бы тело (Т2) имело бы ненулевую скорость движения во внешнем направлении от тела (Т1). Причём, если масса тела (Т2) будет увеличиваться такими же темпами, как выравниваются их скорости при реальном объединении масс движущихся тел, изображённых на рисунке 12.3.1, то скорость центра масс этой неподвижной системы будет изменяться точно так же, как и скорость образующейся системы тел (Т1) и (Т2), движущихся с реальными скоростями. При этом с увеличением массы тела (Т2) вдвое, скорость центра масс неподвижной системы достигнет величины (Vс = V2 / 2).
Таким образом, приобретённый вне системы импульс любого из взаимодействующих тел вносит в новую систему действие, эквивалентное действию, которое внесло бы в неё изначально неподвижное перед новым взаимодействием тело, но с эквивалентной массой, количественно равной ранее приобретённому им импульсу. Такое образное эквивалентное представление интуитивно понятно даже школьникам. Ни у кого не вызывает удивления и возражения тот факт, что центр масс системы всегда ближе к большой массе, чем к малой, т.е. скорее Магомед пойдёт к горе, чем гора к нему, а вместе с Магомедом ещё более приблизится к горе и их общий центр масс. Это образное представление наглядно отражает, в том числе и принцип изменения импульса инерцоида, в котором грузы за счёт дополнительной инерции (скорости) их движения, как раз и становятся такой эквивалентной горой.
Грузы в инерцоиде могут получить дополнительную инерцию движения без изменения его импульса в целом, что при дальнейшем взаимодействии грузов, имеющих переменную динамическую массу, с массой тележки, имеющей значительно меньшую скорость, приводит к изменению общего импульса инерцоида в сторону грузов. Это можно наглядно показать на примере разгона грузов при помощи кратковременного узконаправленного взрыва (см. Рис. 12.3.2), не распространяющегося вдоль оси (ОХ). Вряд ли кто будет отрицать, что, хотя бы в пределах люфтов и зазоров в механических соединениях рассматриваемой конструкции разгон грузов в поперечном направлении происходит без изменения импульса инерцоида в продольном направлении. А вот после каждой локальной выборки зазоров осуществляется движение центра масс инерцоида в сторону грузов, имеющих большую динамическую массу, чем тележка.

Рис. 12.3.2
Как видно на рисунке (12.3.2) при расхождении рычагов в результате воздействия на них обычных, т.е. вполне реальных сил взрыва (Fв) появляются их не менее реальные проекции на радиальные направления вдоль рычагов. Это и есть центробежная сила (Fцб1 и Fцб2), которая за счёт сил инерции поэлементной поддержки (см. гл. 1.2) может многократно повысить инерционность исходной массы грузов и таким образом существенно изменить пространственное положение центра масс инерцоида в направлении действия результирующей силы (Fох) во время взаимодействия грузов с тележкой.
Вряд ли у кого возникнут сомнения в реальности (Fцб1 и Fцб2), т.к. они, как бы мы их не назвали являются прямыми проекциями обычных сил взрыва. Однако даже после прекращения действия взрыва центробежные силы (Fцб1 и Fцб2) вовсе не превратятся в фиктивные, т.е. не существующие силы инерции. В этом случае вместо сил взрыва в действие вступят вполне реальные силы инерции поэлементной поддержки. Ведь даже в соответствии с классической физикой фиктивными центробежные силы являются только для грузов. Для тележки они являются вполне реальными «обычными» силами поэлементной поддержки. С прекращением действия взрыва повышенная инерционность, т.е. скорость движения грузов так же не исчезнет в мгновение ока.
Таким образом, при взаимодействии грузов с тележкой через центробежные силы центр масс системы инерцоида безо всяких парадоксов всегда изменяется в сторону грузов. При этом поступательное движение инерцоида осуществляется в направлении, в котором проявляется положительная разность противоположно направленных центробежных сил в передней и задней полуплоскости инерцоида.
Изобретатель инерцоида В. Н. Толчин всячески отрицает причастность центробежной силы к поступательному движению инерцоида. В своей книге «Инерцоид. Силы инерции как источник поступательного движения» Пермское книжное издательство 1977 г. на стр. 12 Толчин В. Н. пишет: «Очень существенно увидеть, что в течение всего первого полутакта грузы не вращаются относительно арбитражной системы отсчета, не связанной с корпусом механизма, а движутся в поперечном направлении прямолинейно сначала от продольной оси механизма, а потом по направлению к ней с небольшим продольным ускорением».
Далее на стр. 87 в подтверждение своего мнения о поперечном движении грузов в отсутствие центробежных сил Толчин пишет: «Если на вращающемся рычаге закреплено тело (рис. 65), оно перемещается по кругу. Если закрепление исчезнет, а тело может перемещаться вдоль рычага, то перемещаясь по касательной, оно одновременно перемещается и вдоль рычага. При этом на тело не действуют никакие силы. …Какой может быть разговор о центробежных силах, если грузы движутся прямолинейно? Хотя бы и с большой скоростью. Отсюда видно, что центробежные силы не принимают участия в динамике инерцоида. В его динамике участвуют тангенциальные к продольной оси механизма силы инерции».

И резюме по поводу центробежных сил на стр. 87: «Когда оппоненты доказывали неосуществимость инерцоидов, то они имели в виду действие центробежных сил в течение одного оборота рычагов. В этом случае сумма моментов центробежных сил действительно получалась равной нулю. Они исходили не из равенства центробежных и центростремительных сил, но все-таки были ближе к истине, чем „защитники“, которые пытались объяснить перемещение инерцоида действием центробежных сил».
Отрицание Толчиным роли центробежных сил инерции в инерцоиде вызывает, как минимум недоумение и вовсе не потому, что он поддерживает в этом вопросе классическую физику, для которой они являются несуществующими фиктивными силами инерции. Это вряд ли смутило бы Толчина, т.к. сам он считает силы инерции вполне реальными силами. Вот, что говорит Толчин по поводу реальности сил инерции: «Сила инерции неотделима от массы. Масса может быть познана и определена только через силу инерции и ускорение. Других способов ее определения не существует. Обе они (масса и сила инерции) одинаково реальны. (Толчин, стр. 79) …Без признания реальности сил инерции не может соблюдаться третий закон механики в случае динамического равновесия. (Толчин, стр. 80)».
Поперечные силы Толчина, которые, по его мнению, движут инерцоид, так же являются силами инерции. Поэтому недоумение вызывает не негативное отношение Толчина к реальности сил инерции. Недоумение вызывает его неспособность увидеть в своих поперечных силах инерции первопричину образования самых обычных центробежных сил. В отсутствие радиального закрепления грузы действительно могут двигаться прямолинейно в поперечном направлении, но только не к продольной оси инерцоида, а к радиусу. Однако при этом грузы не перестанут поворачиваться вслед за радиусом. Следовательно, грузы не потеряют при этом связь с тележкой, где расположен их центр вращения, через центробежные силы, которые возникают всегда при изменении направления скорости.
Отрицая центробежные силы, Толчин противоречит сам себе. С одной стороны на стр. 87 (см. выше) он пишет: «…Какой может быть разговор о центробежных силах, если грузы движутся прямолинейно?». Действительно, никакого разговора! Но на стр. 10 Толчин говорит уже об образовании динамического центра инерции именно за счёт изменения поперечного направления: «После выключения работы двигателя… грузы с большой скоростью движутся по инерции от продольной оси механизма в поперечном направлении (Рис. 3). Поэтому грузы трудно отклонить в продольном направлении, трудно изменить их поперечное направление движения. Грузы становятся динамической точкой опоры для корпуса, к которой он подтягивается на линию общего динамического центра инерции системы масс инерцоида». Но «трудность», которая по мнению Толчина, и образует динамический центр инерции инерцоида, вызывают именно центробежные силы!
За счёт отсутствия жесткого закрепления центра вращения грузов относительно арбитражной системы отсчёта, вследствие его расположения на подвижной тележке, что в некоторой степени, равносильно отсутствию радиального закрепления самих грузов, о котором говорит Толчин (см. Рис. 65), абсолютная траектория движения грузов действительно несколько сплющивается в продольном направлении. Это действительно свидетельствует в пользу наличия поперечных сил Толчина, так или иначе причастных к движению инерцоида. Однако от этого траектория движения грузов не перестаёт быть криволинейной, т.е. направление движения грузов в любой системе отсчёта не перестаёт изменяться, от чего и образуются центробежные силы. Это означает, что сплющивание траектории является не причиной движения инерцоида, а следствием его движения под действием центробежных сил.
В результате малейшего поворота рычагов после прохождения грузами точки пересечения с продольной осью в первой четверти такта их линейная скорость, которая всегда поперечна, прежде всего, к радиальным рычагам, имеет отрицательную проекцию на продольную ось инерцоида, т.е. силы инерции окружного движения грузов всегда поворачиваются навстречу тележке. Не исключено, что именно это обстоятельство и является одной из причин, по которой Владимир Николаевич заостряет внимание на строго поперечных силах инерции, т.к. силы, направленные против движения, не могут быть причиной этого движения. Однако в момент пересечения грузами продольной оси инерцоида их скорость вообще не имеет проекций на неё, т.е. они так же не могут быть причиной движения инерцоида вдоль его продольной оси. А вот центробежные силы не имеют проекции на продольную ось инерцоида только в короткие мгновения пересечения ими поперечной оси инерцоида. Всё остальное время первой четверти такта они реально проявляются вдоль продольной оси в положительном направлении.
Дело в том, что куда бы ни была направлена истинная скорость инерционного движения, силы инерции обнаруживают себя как обычные силы во всех направлениях противоположных тем, в которых инерционному движению что-либо препятствует. В инерцоиде препятствующая движению грузов центростремительная сила упругости приложена к ним вдоль рычагов. Поэтому вдоль рычагов независимо от фазы их вращения проявляется вполне реальная обычная сила инерции движения грузов, в виде центробежной силы инерции поэлементной поддержки. А поскольку растягивает рычаги не неподвижный в общем случае диаметрально уравновешенного вращения центр вращения, а вполне реальные центробежные силы поэлементной поддержки грузов, то их проекции на продольную ось так же вполне реально проявляются в виде обычных сил, всегда направленных от центра вращения.
Один из самых труднообъяснимых моментов в обосновании Толчиным В. Н. принципа движения инерцоида заключается в том, что Владимир Николаевич отказывается не только от центробежных сил, но и от самого движения «динамического центра инерции системы масс инерцоида». В главе 5 на стр. 69 Толчин утверждает, что динамический центр системы масс всегда остается неподвижным, что вообще противоречит принципу движения инерцоида, как замкнутой системы. Но в таком случае он ничем не отличается от статического центра инерции, который свидетельствует о неподвижности замкнутой системы.
Вот как это видит сам Толчин: «…динамический центр инерции системы масс никогда „постепенно не перемещается“. Такое противно его физической природе. В любом случае он возникает на месте действия одновременно с возникновением действия и образования самой динамической системы масс; остается неподвижным пока продолжается действие; и исчезает по прекращении действия на том самом месте, где он возникал, одновременно с исчезновением и распадом самой системы масс».
Далее на стр. 70 Толчин приводит пример, подтверждающий, по его мнению, описанное им поведение динамического центра инерции: «Когда источник силы прочно соединен с одним из главных тел процесса, динамический центр инерции системы масс (автомобиль – Земля) в горизонтальном направлении ежемгновенно возникает, ежемгновенно остается неподвижным и ежемгновенно исчезает, чтобы в следующий момент возникнуть на новом месте в связи с поворотом ведущего колеса автомобиля (рис. 62)».


Но точка взаимодействия автомобиля с дорогой вообще не является центром инерции системы «автомобиль – Земля». Автомобиль взаимодействует не с неподвижной точкой его контакта с Землёй, расположенной на дороге, а с самой Землёй. При этом в отсутствие внешних сил реальная точка центра инерции системы «автомобиль – Земля», которая вовсе не является точкой контакта взаимодействия автомобиля с землёй, действительно никуда не движется ни при наличии действия, ни при его отсутствии. Именно поэтому центр инерции системы «автомобиль – Земля» нигде ежемгновенно не появляется и ниоткуда ежемгновенно не исчезает. Он не только существует постоянно, но и никуда не движется. Следовательно, этот пример вообще не соответствует движению системы инерцоида, центр масс которого реально перемещается в пространстве.
В подтверждение своей версии движения инерцоида В. Н. Толчин приводит ещё один пример – реактивное движение ракеты, ставя его в параллель с движением автомобиля по дороге: «То же самое можно сказать и о движении ракеты. В каждый последующий момент действие начинается всё на новом и новом месте. Ракета движется с ускорением. Как только действие прекратиться, ракета переходит на движение по инерции в принципе неотличимое от неподвижности. При этом исчезает не только динамический центр инерции масс: корпуса ракеты и массы извергающихся газов, от которых ракета отталкивается, но разрушается и сама система масс, поскольку в этом случае она возникла в результате расщепления одного тела на две части. Если начинается новое действие ракеты, оно опять начинается на новом месте с нового момента. Вновь появляется второе главное тело процесса – извергающиеся газы».
Из этого заявления Толчина становится, наконец, понятным, почему, по его мнению, динамический центр инерции масс инерцоида в каждой новой точке пространства появляется без непрерывного движения, т.е. либо по «щучьему велению», либо по законам анимации, которая вместо смены точек в результате действия предполагает смену образов действия в одной точке. Причина в том, что по Толчину динамический центр инерции системы во время её движения по инерции отсутствует и появляется только при наличии действия. Динамику в физике действительно определяет сила (действие), но сама по себе сила это ещё не центр масс, хоть динамический, хоть статический. Действие действительно изменяет, а точнее определяет заново общий центр масс вновь образующихся систем. Но в точке контакта в любом случае, говоря словами Владимира Николаевича, действительно «ежемгновенно возникает, ежемгновенно остается неподвижной и ежемгновенно исчезает, чтобы в следующий момент возникнуть на новом месте» вовсе не центр масс системы, а только сама сила (см. главу 1.2.1 «Мера взаимодействия»).
Сила не является материальной субстанцией – это свойство материи, а свойство может изменяться не в пространстве и времени, а в материи и времени. Поэтому свойство материи не может перемещаться в пространстве, подобно самой материи. Оно либо проявляется, либо не проявляется, т.е. либо ежемгновенно возникает, либо ежемгновенно исчезает, но не в пространстве, а в самой материи. Не перемещается в пространстве, в том числе собственно и само свойство материи – движение. Ведь движется-то собственно не свойство материи – движение, а только сама материя. Для свойств материи пространства не существует. Их пространством является сама материя.
Владимир Николаевич, по всей видимости, просто путает силу и центр масс системы, который хотя иногда и условно определяется в пустом пространстве между телами системы или даже между частями одного тела сложной конфигурации, но он обозначает именно единое материальное физическое тело или систему, имеющие свойство перемещаться в пространстве физически, а не по законам анимации (телепортации): то дематериализуясь, то вновь материализуясь по ходу движения. Центр масс любой системы, либо уже существующей, либо ещё только образующейся всегда обозначает массу-материю, которая существует независимо от нашего сознания. Поэтому даже если готовая система движется по инерции или ещё только-только образуется новая система, её центр масс перемещается в пространстве вполне физически, без какой-либо мистики телепортации.